Roboty
Solobot
Robot MicroMouse
Autorzy
Kateryna NaumenkoWitek Pietroń
Aleksander Samek
Michał Zelwak
Motywacja
Solobot to robot typu Micromouse, którego zadaniem jest pokonywanie labiryntu. Urządzenie ma znaleźć rozwiązanie labiryntu, a następnie “pokonać” labirynt w jak najkrótszym czasie. Od samego początku projektowaliśmy robota z myślą o zawodach robotów Micromouse. Zgodnie z ich regulaminem labirynt ma kształt kwadratu podzielonego na segmenty o wymiarach 16 cm na 16 cm. Na krawędziach segmentów ustawione są pionowe ścianki, które mogą być skonfigurowane w dowolny sposób. Przy podejściu do rozwiązywania labiryntu robot nie posiada wiedzy o ustawieniu ścian. Pojazd nie może też komunikować się ze światem zewnętrznym w czasie wykonywania zadania.
Założenia konstrukcyjne
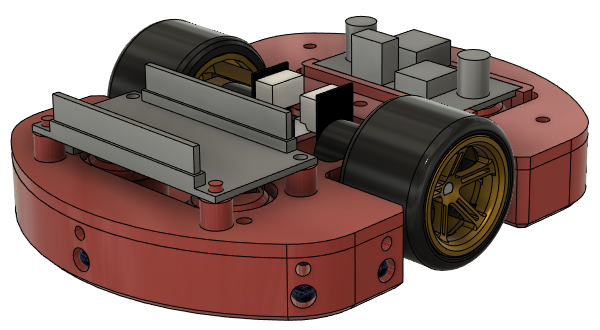
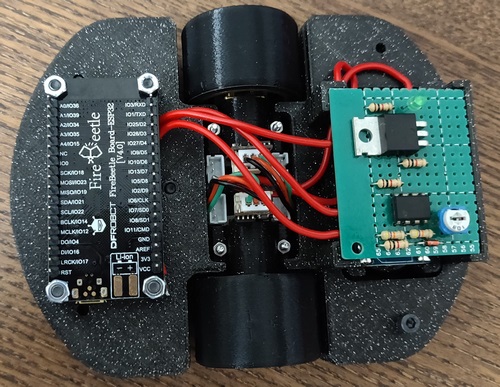
Robot tego typu musi być zatem kompaktowy, aby zmieścić się w segmencie. Najlepiej, by miał możliwość obracania się wokół własnej osi ze względu na ograniczoną ilość miejsca. Z tego powodu zdecydowaliśmy się na konstrukcję dwukołową z napędem różnicowym. Do nawigowania w labiryncie robot potrzebuje zestawu sensorów. Użyliśmy czujników odbiciowych pracujących w zakresie podczerwieni z przodu i po bokach pojazdu. Jest to wystarczające do określenia ustawienia ścian w danym segmencie i nie obciąża jednostki obliczeniowej nadmierną ilością danych. Na kołach zamontowaliśmy enkodery pozwalające na dokładne zmierzenie pokonywanej odległości. Dzięki temu robot powinien być zawsze świadomy w którym segmencie się znajduje.
Potencjał rozwojowy
Dzięki użyciu technologii druku 3D łatwo jest modyfikować fizyczne parametry robota. Mamy więc możliwość ciągłego rozwoju platformy w celu osiągania jak najlepszych efektów. Najważniejszą jednak częścią prac nad naszym robotem będzie opracowanie odpowiedniego algorytmu rozwiązywania labiryntu. To właśnie zadecyduje o tym, czy robot będzie miał szanse na osiąganie sukcesów na zawodach. Na tej części projektu planujemy się skupić w najbliższym czasie.