Roboty
Mobo
Sześciokołowy Robot Mobilny
Autorzy
Sławomir RychtaPiotr Trojanek
Łukasz Romanowski
Krzysztof Lange
Wstęp
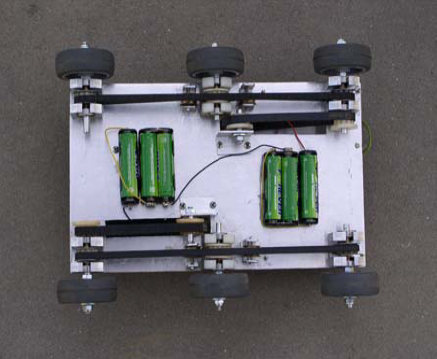
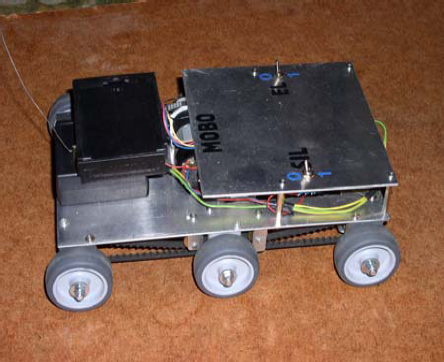
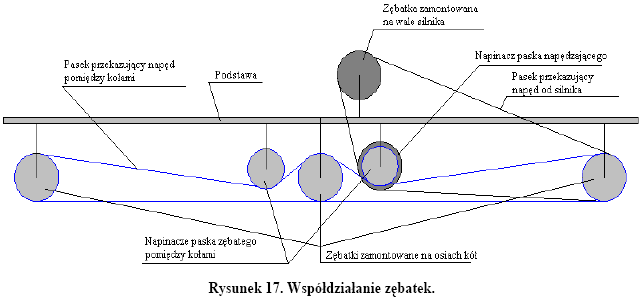
Cytując za pracą dyplomową autorstwa Sławomira Rychty: “Robot mobilny ma sześć kół zamontowanych na trzech osiach. Do napędu użyto dwóch silników prądu stałego. Każdy z silników napędza trzy koła na jednej stronie robota poprzez zastosowanie pasków zębatych z współpracującymi z nimi zębatkami. Napęd przekazywany jest z silnika na koło zewnętrzne, z którego poprzez pasek zębaty napędzane są pozostałe koła. Każde z kół zostało ułożyskowane w specjalnie zaprojektowanych uchwytach. Nad naciągiem czuwa po dwa napinacze zrobione z odpowiedniej rolki. Silniki zamontowane są na górnej części podstawy robota, wzdłuż środkowej osi kół. W dolnej części podstawy umieszczono zestaw akumulatorków zasilających.”
Cel projektu
Naszym zadaniem jest zaprojektowanie i wykonanie elektronicznego układu sterowania oraz pomiaru parametrów ruchu robota.
- Parametry sterownika:
- łącze radiowe (BlueTooth) do komunikacji robota z PC lub łącze 433MHz oparte na module CC1000
- sterowanie dwóch silników DC sygnałem PWM przez układ H-mostków L293D
- układ dwóch enkoderów optycznych, zamontowanych na osiach silników (na bazie czujników od myszki kulkowej)
- układ dwóch enkoderów mierzących *rzeczywiste* przemieszczenie robota (na bazie czujników od myszy optycznej)
Wykonanie
- tanie łatwodostępne myszki optyczne, wyposażone w pełny tor optyczny oparty na czujniku HDNS-2000
- przykład zastosowania tych czujników jako układu odometrii robota mobilnego
- bardzo dobre opracowanie nt. czujników z myszy optycznych
- informacje o układach z myszy optycznych
- mikrokontrolerATMega48, *prawdopodobnie* nadający się jako jednostka centralna, wymagania do połączenia kolejno:
- silników: 2 wyjścia PWM (conajmniej 8-śmio bitowe) + 2 wyjścia binarne (kierunek)
- enkoderów od myszki kulkowej: 2 wejścia przerywające + 2 wejścia binarne
- enkoderów od myszki optycznej: 4 wejścia przerywające + 4 wejścia binarne; do konfiguracji: I2C
- bluetooth: UART