Roboty
MiniRyś V4
Robot balansujący
Autorzy
Kamil ForyszewskiMichał Stolarz
Daniel Giełdowski
Piotr Matysiak
Opis
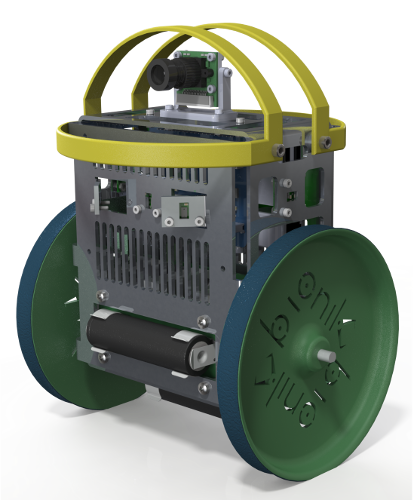
Robot balansujący MiniRyś to konstrukcja robota mobilnego o zmiennym trybie lokomocji, przystosowana do pracy w grupie. Wersja czwarta MiniRysia różni się od poprzednich wersji zarówno konstrukcją mechaniczną, elementami elektronicznymi, jak i oprogramowaniem.
Opis konstrukcji
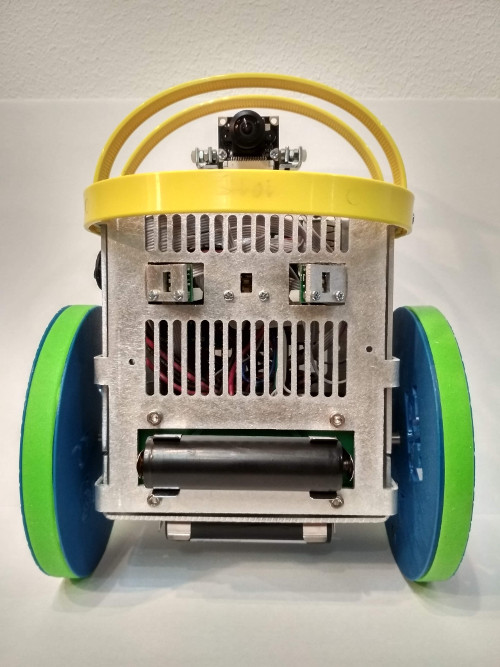
Głównym elementem konstrukcyjnym (tak jak w poprzedniej wersji) jest aluminiowa rama. Zapewnia ona mocowanie pozostałych części oraz stanowi obudowę robota. Została wykonana w technologii cięcia laserem oraz gięcia CNC. Istotnym elementem konstrukcji są również koła które zostały wydrukowane na drukarce 3D. Na szczególną uwagę zasługują frontowe panele ochronne, których brakowało w poprzednim modelu MiniRysia. Obecna konstrukcja zapewnia ochronę wrażliwych komponentów. Nowością jest także zastosowanie kamery RGB w górnej części robota. Może zostać wykorzystana zarówno w trybie balansującym jak i poziomym, w zależności od aplikacji.

Opis elektroniki
Elektronika w nowej wersji MiniRysia została znacząco zmieniona. Wymaganiami stawianymi systemowi sterowania były między innymi: zapewnienie możliwie dokładnej percepcji otoczenia czy też uproszczenie systemu sterowania. Jako jednostka sterująca został wybrany komputer jedno-płytkowy Raspberry Pi 3B+. Jednostka obliczeniowa charakteryzuje się znacznie bardziej wydajnymi podzespołami w stosunku do komputera zastosowanego w dotychczasowym prototypie. Pozostałe nowe komponenty MiniRysia V4 to m.in.:
- Moduł inercyjny LSM6DS33
- Kamera Waveshare OV5647
- Czujnik odległości Pololu VL53L1X
Istotnym elementem robota jest specjalnie zaprojektowany shield rozdzielający sygnały sterujące oraz magistrale komunikacyjne. Zawiera w sobie m.in.: różnorodne złącza, przetwornicę napięcia służącą do zasilania warstwy logicznej, czy też sterowniki silników krokowych.

Opis Oprogramowania
W ramach projektu została zaimplementowana niskopoziomowa warstwa bibliotek, umożliwiająca wykorzystanie funkcji urządzeń elektronicznych podłączonych do płyty głównej robota. Założeniem implementacji było takie dostosowanie bibliotek aby mogły zostać one wykorzystane w wysokopoziomowej warstwie opartej o system ROS. Powstały biblioteki umożliwiające odczyt danych ze wszystkich sensorów na robocie z zadaną dokładnością, oraz biblioteka do sterowania silnikami umożliwiająca konfigurację pracy każdego z silników i zadawanie prędkości.