Roboty śledzące linię
Jednoręki T-Rex
Robot LegoFTL
Autorzy
Michał KitaWojciech Kaczmar
Konstrukcja
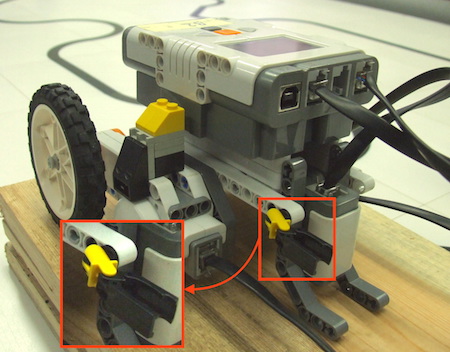
Postawiliśmy na lekką konstrukcję z wykorzystaniem dwóch napędów kołowych i jednego czujnika światła, który umieszczony był z przodu pojazdu. Obecność tylko jednego czujnika światła była główną zaletą naszego robota, ponieważ mogliśmy zgłosić go do zawodów Bionikalia organizowanych na naszym wydziale. Oprócz tego robot charakteryzował się stabilną konstrukcją umożliwiającą łatwe wypinanie i wymienianie modułu centralnego. Cechą charakterystyczną była również rączka chwytająca umieszczona tylko po jednej stronie pojazdu (drugiej nie znaleźliśmy). W ten sposób nadaliśmy naszemu robotowi nazwę Jednoręki T-Rex.
Podczas zajęć laboratoryjnych badaliśmy jak konstrukcja, a w szczególności położenie czujnika światła wpływało na szybkość przejazdu robota. Okazało się że duże znaczenie miał wybrany algorytm sterowania pojazdu. Jak wynikało z naszych doświadczeń, nie ma jednej uniwersalnej konstrukcji która byłaby optymalna dla wszystkich programów. Dla naszego algorytmu najlepsza okazała się konstrukcja z wysuniętym czujnikiem światła do przodu, dzięki czemu robot dość szybko pokonywał trudne zakręty (nawet sekwencję ostrych zakrętów o kącie 90 stopni).
Czujnik światła umieściliśmy tuż nad powierzchnią toru, żeby otrzymywać jak najdokładniejsze dane o natężeniu światła. Warto zaznaczyć że robot przez cały czas trwania zajęć był testowany na wymagającej trasie z wieloma zakrętami, przez co konstrukcja i algorytm były dostrajne w ten sposób aby robot oprócz szybkiej jazdy, trzymał się cały czas trasy. Na skuteczność pokonywania trasy duży wpływ miało oświetlenie w sali. Odczyty wartosci dla białej i czarnej linii sprawdzaliśmy praktycznie na każdych zajeciach, ponieważ drobne różnice w oświetleniu i warunkach fizycznych w danym dniu, powodowały znaczące zmiany we wskazaniach czujnika światła. Z tego powodu zdarzało się, że robot któy tydzień wcześniej bez problemu pokonywał całą trasę, na następnych zajęciach wypadał z pierwszego napotkanego zakrętu.
Działanie
Tworząc program sterujący robotem, szukaliśmy algorytmu prostego koncepcyjnie, a zarazem działającego jak najskuteczniej. Po przetestowaniu kilku różnych rozwiązań, ostatecznie wybraliśmy opisany poniżej program.
Nasz robot przechodził nieustannie między dwoma stanami:
- skręcaj w lewo
- skręcaj w prawo
Kiedy czujnik światła wykrył, że została przecięta czarna linia, następowała zmiana stanu. W ten sposób, w stanie początkowym robot skręcał w lewo, kiedy przecinał linię zaczynał skręcać w prawo, a po ponownym przecięciu czarnej linii znowu wchodził w stan skręcania w lewo itd.
Wyniki zawodów
Na ostatnich zajęciach zostały przeprowadzone zawody, które wyłoniły najszybszego robota. Każdy z zespołów miał dwa przejazdy, z któych lliczył sie najlepszy czas. Nasz robot, po zaciętym boju zajął drugie miejsce przegrywając zaledwie o jedną sekundę ze zwycięzcą. Należy zauważyć, że zwycięzki robot posiadał aż cztery czujniki światła (które umożliwiały mu lepszą analizę trasy i płynniejszą jazdę), podczas gdy nasz składał się tylko z jednego czujnika, a mimo to osiągał porównywalne wyniki.
Po obiecujących wynikach zawodów z ostatnich zajęć, postanowiliśmy spróbować naszych sił w zawodach “Bionikalia”, organizowanych na naszym wydziale przez koło naukowe Bionik. Tutaj mogły startować wyłącznie roboty posiadające jeden czujnik. Jednoręki T-Rex odniósł ogromny sukces plasując się na pierwszym miejscu!