Roboty śledzące linię
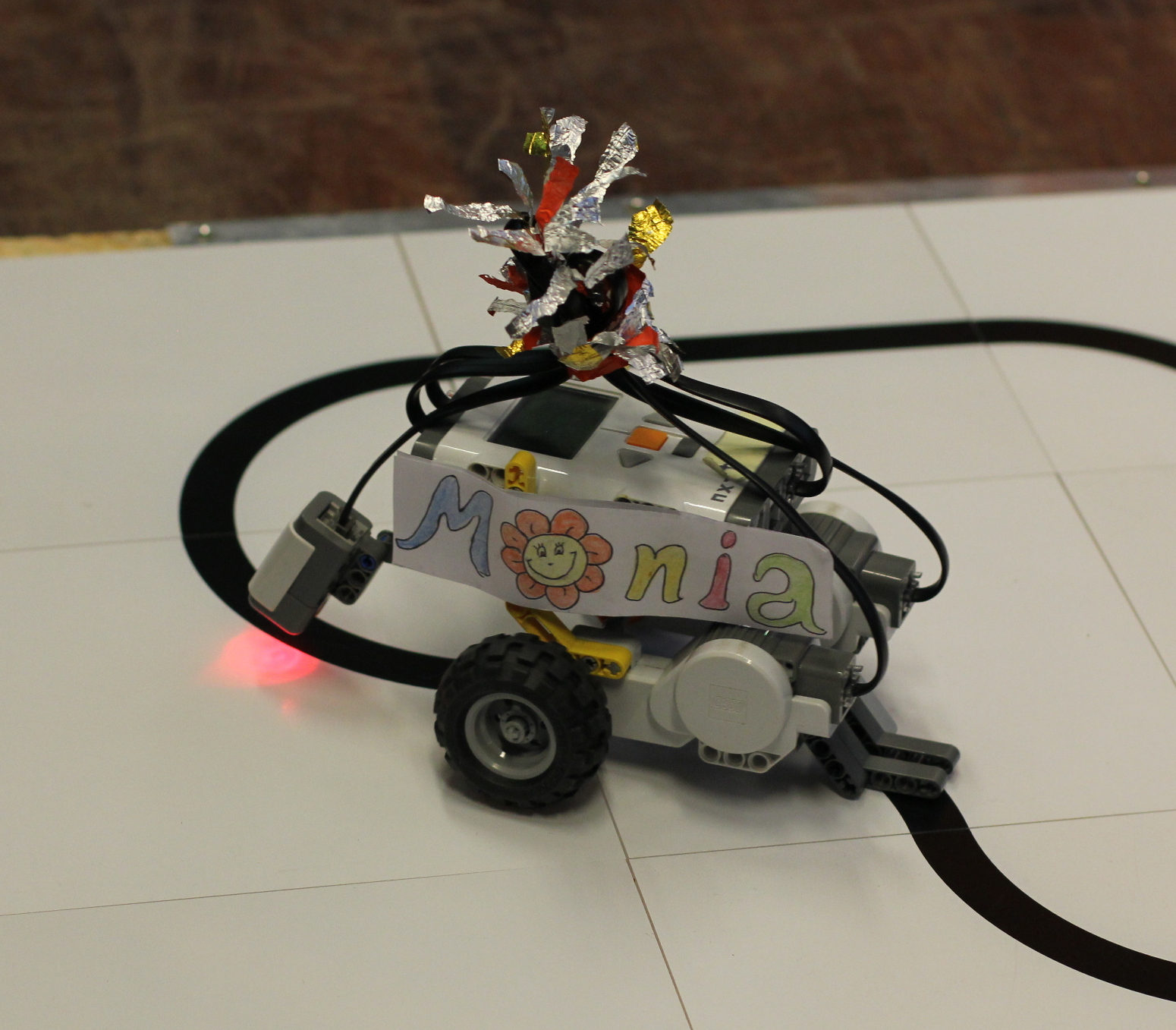
Monia
Robot LegoFTL
Autorzy
Dawid DąbrowskiKatarzyna Mioduszewska
Konstrukcja
Robot zbudowany na podstawie prostego opisu z internetu. Dodatkowo, eksperymentowano z różnymi modelami kół oraz ich rozstawem, a także z pozycją czujnika natężenia światła odbitego, te trzy czynniki miały znaczący wpływ na efektywność pokonywania trasy.
Zasada działania i wyniki
Algorytm opierał się na regulatorze PID, z parametrami dobranymi na dokładne śledzenie linii i jak najmniejsze oscylacje. Niestety, dokładność nie była oceniana i robot przegrał z szybszymi, lecz mniej dokładnymi. Na trasie kwalifikacyjnej zastosowano modyfikację polegającą na zmianie algorytmu na gorzej wyregulowany, ale szybszy, która następowała po pokonaniu najostrzejszego zakrętu trasy. Niestety, nie było to wystarczające do awansu do finału.