Roboty
HexaPod
Sześcionożny Robot Kroczący
Autorzy
Krystian MarekPiotr Przybyła
Piotr Trojanek
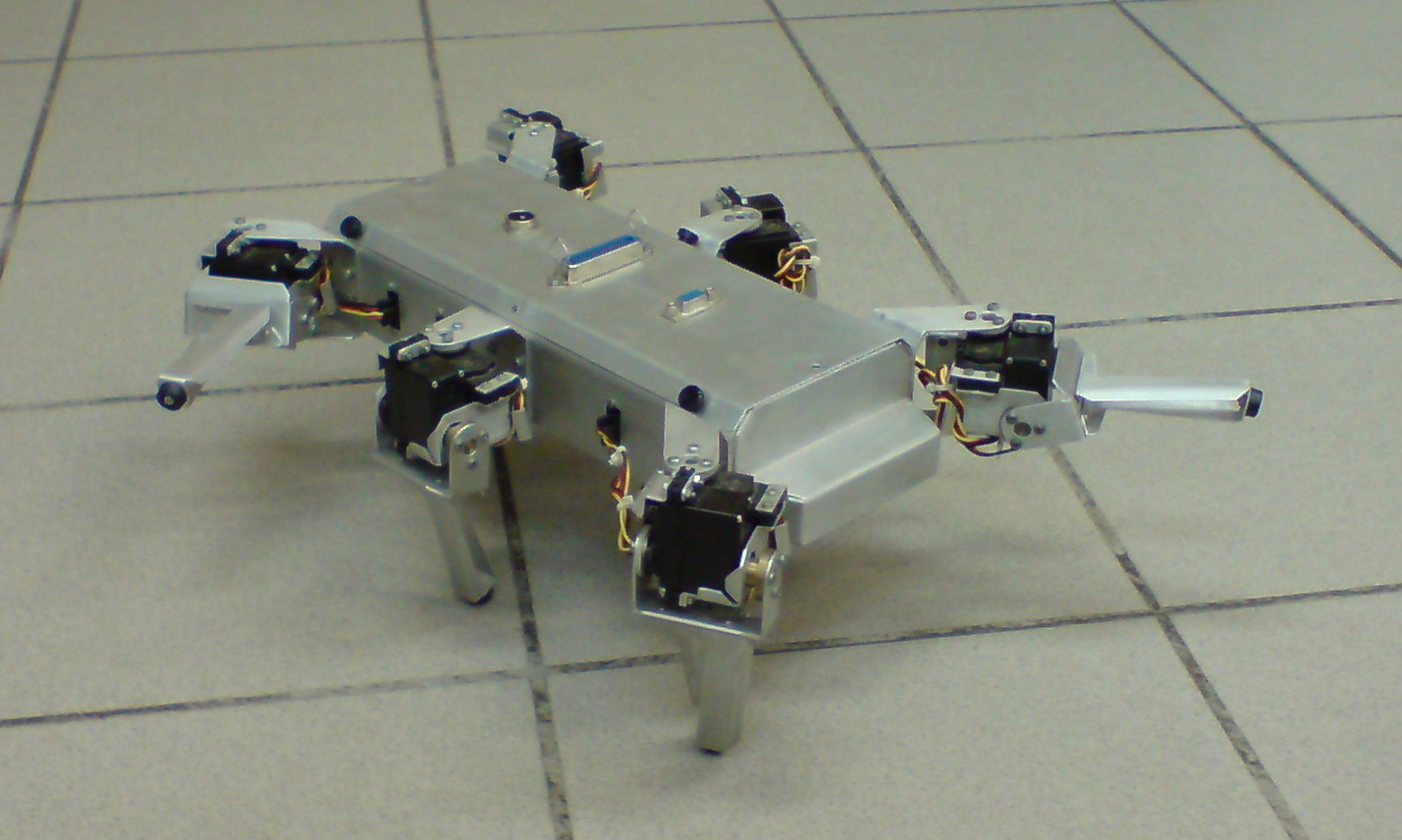
Projekt jest rozwinięciem Pracy dyplomowej Dariusza Mętraka. Głównym celem projektu !HexaPod jest kompleksowa modernizacja elektroniki sterującej serwomechanizmami MENTOR’a I, będącego przedmiotem poprzedniej pracy.
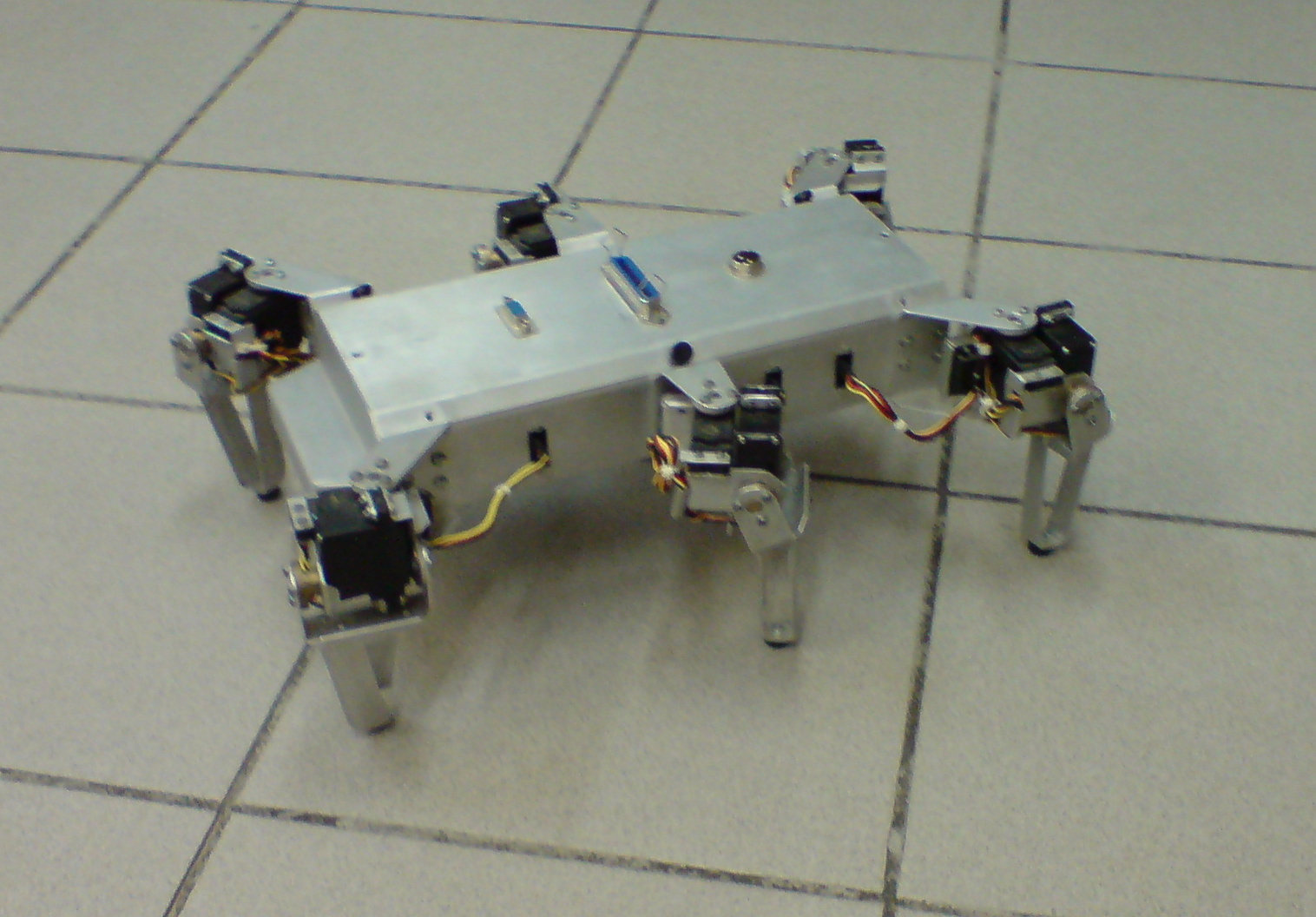
Dzięki tym zabiegom sterowanie robotem stanie się dużo prostsze, obok zwyczajnej komunikacji “po kablu” zyskamy również możliwość łączenia sie z urządzeniem poprzez Bluetooth. Możliwe stanie się również poszerzenie “świadomości” robota o czujniki styku z podłożem oraz umiejętność wykrywania i omijania przeszkód.
Obecny projekt układu sterującego zakłada komunikację z komputerem przez port RS-232, sercem układu jest Atmega16L, za pamięć absolutna odpowiadają kości EEPROM również od atmela.
Zaprojektowany przez nas układ wygląda następująco:
A tak prezentuje się, wykonana specjalnie na nasze zamówienie, płytka drukowana:
