Roboty
Bombel V3
Dydaktyczny robot manipulacyjny
Autorzy
Michał RomanowskiPiotr Matysiak
Opis
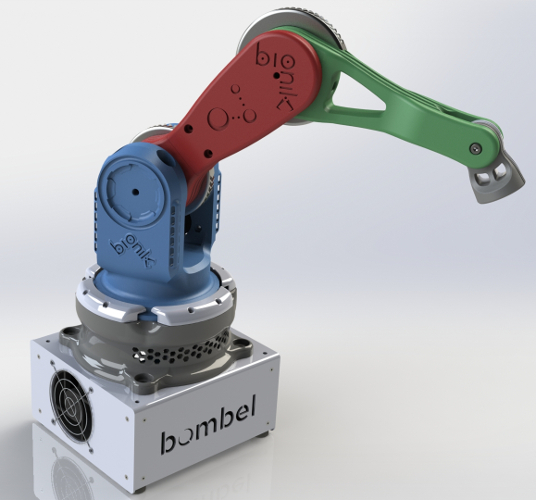
,,Bombel’’ jest dydaktycznym robotem manipulacyjnym. Dydaktycznym, ponieważ ma wspomóc proces nauki członków koła i studentów. Na celu ma też spopularyzowanie wiedzy na temat robotów manipulacyjnych. W wersji 3 wprowadzono modyfikacje konstrukcji oraz elektroniki, które usprawniły działanie platformy oraz zwiększyły jej możliwości aplikacyjne. Obecna wersja robota cechuje się zwiększonym udźwigiem maksymalnym oraz mniejszymi luzami na przekładniach. Ponadto, uproszczono proces montażu robota, dzięki czemu kolejne egzemplarze platformy mogą zostać wytworzone w krótszym czasie.
Opis konstrukcji
Zasadnicza część elementów konstrukcyjnych robota została ponownie wykonana w technologii druku 3D, ponieważ umożliwia ona tanią produkcję pojedynczych elementów konstrukcyjnych o skomplikowanych kształtach. W odróżnieniu jednak od poprzedniego modelu obudowa została znacznie zmiejszona. Zmodyfikowano też przekładnie, co zaowocowało zmniejszeniem głośności pracy i zmniejszyło luzy. Warto też wspomnieć, że tym razem przewody zasilające i sterujące poprowadzono wewnątrz członów robota.
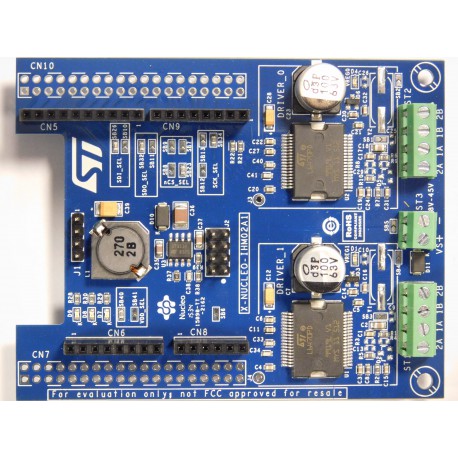
Opis elektroniki
Elementami, które zostały zmienione (w stosunku do poprzedniej wersji) są sterowniki silników krokowych. Poprzednio zastosowano model, którego funkcjonalność ograniczała się do zadawania kolejnych kroków w czasie. Niestety wymagało to dużego narzutu programowego przy sterowaniu pozycją na stawach manipulatora. Sterowniki zmieniono na produkt firmy STMicroelectronics oznaczony kodem L6470. Nowe sterowniki udostępniają szerokie możliwości konfiguracyjne i pozwoliły na zwiększenie wydajności programu sterującego oraz bezpieczeństwa aplikacji.