Roboty
Bender
Robot Mobilny
Autorzy
Marcin Gajewski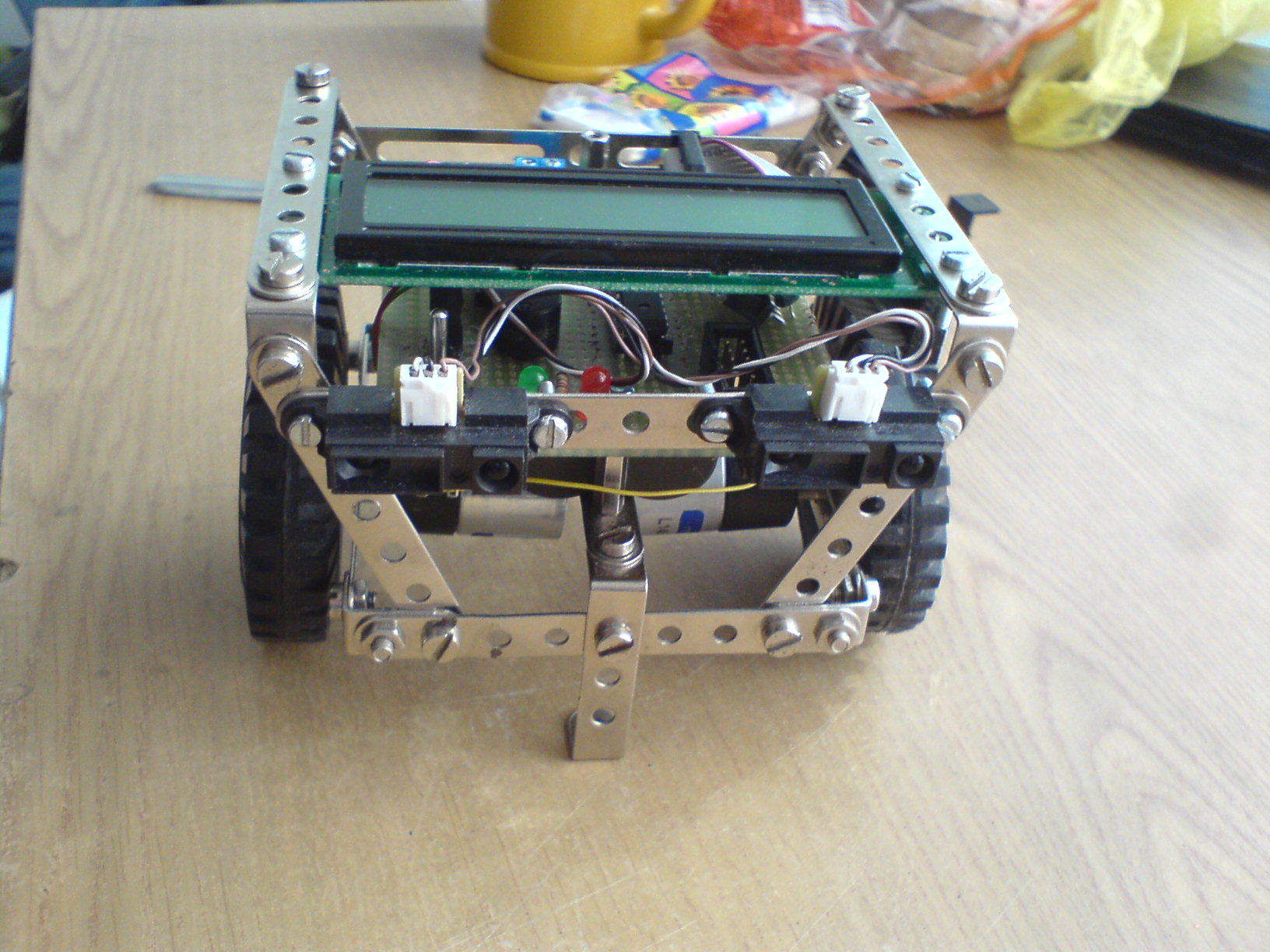
Konstrukcja
Spis sprzętu i modułów:
- nadwozie zbudowane z metalowych klocków
- dwa silniki (1:21) 6V
- wyświetlacz LCD ze sterownikiem HITACHI (16*2)
- dwa mikroprocesory ATMEGA8-16PU
- 2 H-bridge na układzie L293D
- dwa liniowe sensory odległości SHARP 2D120X
- buzzer 5V
- bateria od kamery cyfrowej ok 7,4 V
- trzy stabilizatory napięcia na 5V L7805C
- dioda czerwona i zielona 5 mm do sygnalizacji
- zdalne sterowanie od zabawki na 27MHz
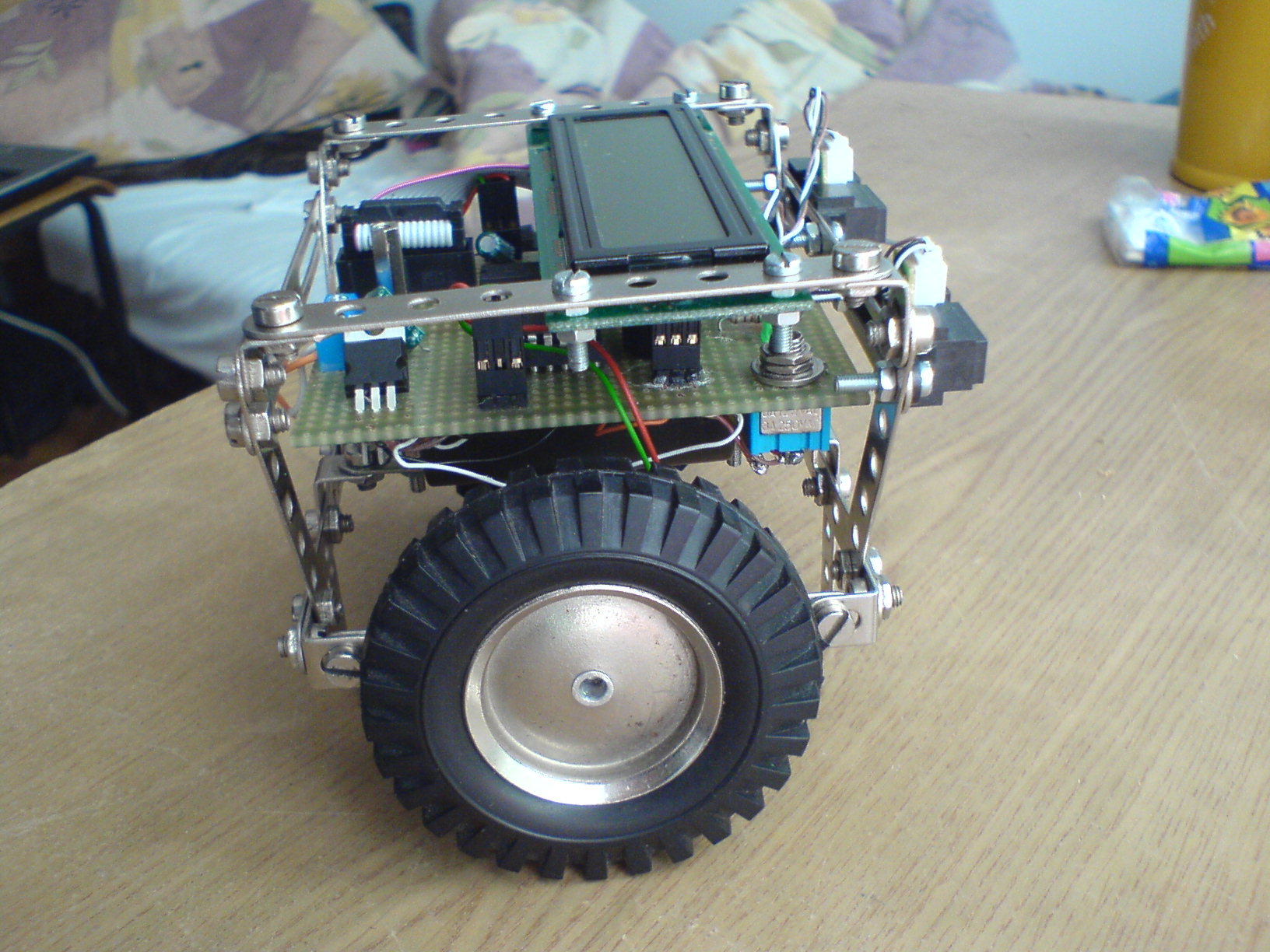
Nadwozie
Nadwozie mimo, iż jest wykonane z metalowych klocków, jest stosunkowo lekkie. Wszystko elegancko do siebie pasuje, jednak przy długim testowaniu robota możliwe jest odkręcanie się śrubek. Nadwozie zostało przygotowywane na zawody SUMO, jednak z czasem projekt ewoluował. Cała elektronika jest umieszczona na dwóch platformach i jest w łatwy sposób wymienialna.
LCD
Na początku zaistniały problemy z uruchomieniem lcd. Było to spowodowane dużym poborem prądu. Po zastosowaniu osobnego stabilizatora układ działał poprawnie.
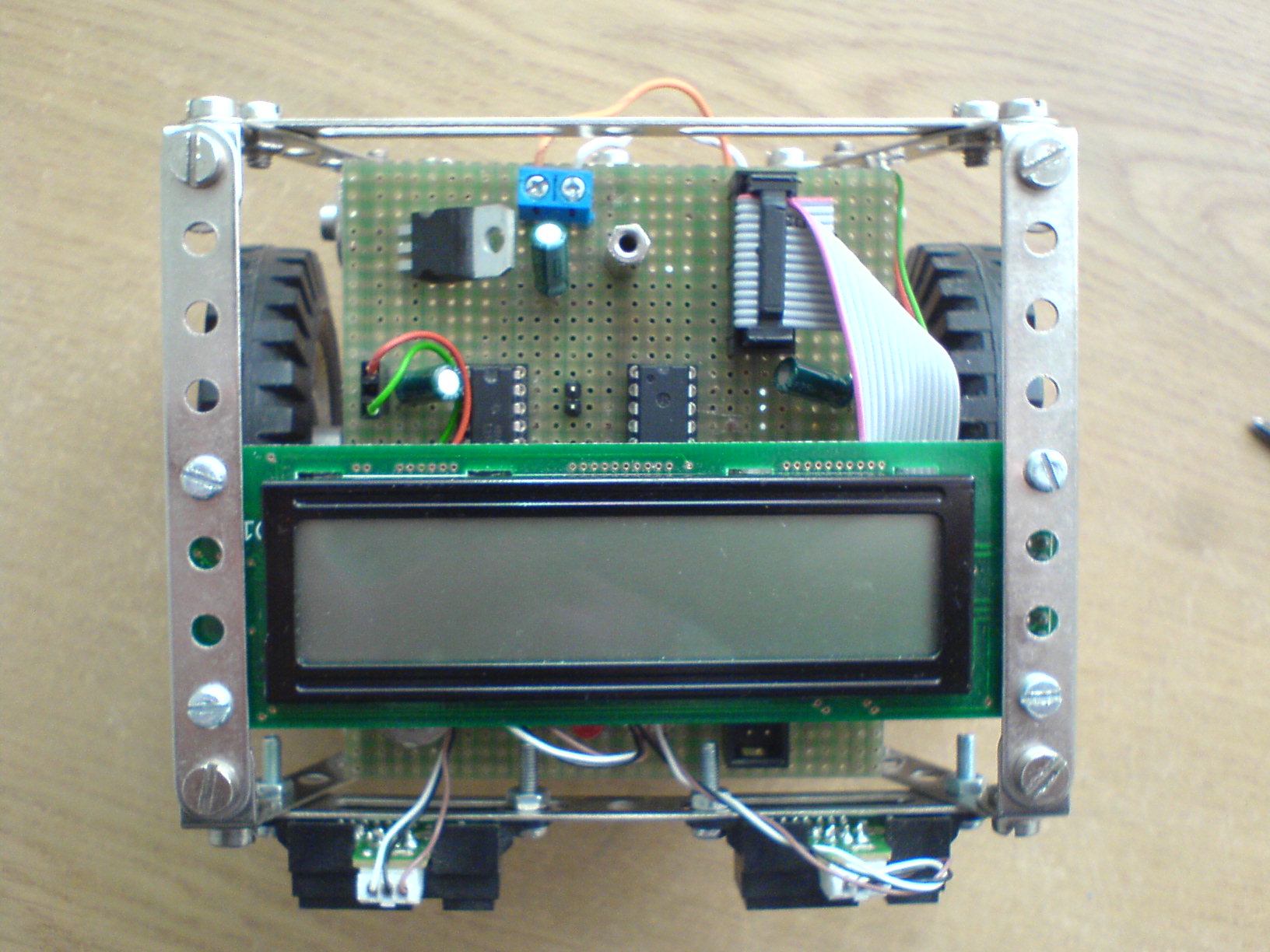
Mikroprocesory
Użyte zostały dwa mikroprocesory Atmega 8 połączone ze sobą równolegle za pomocą portów USART: input oraz output. Procesory wymieniają między sobą tylko najważniejsze informacje i dzielą między sobą czasochłonne operacje.