Projekty
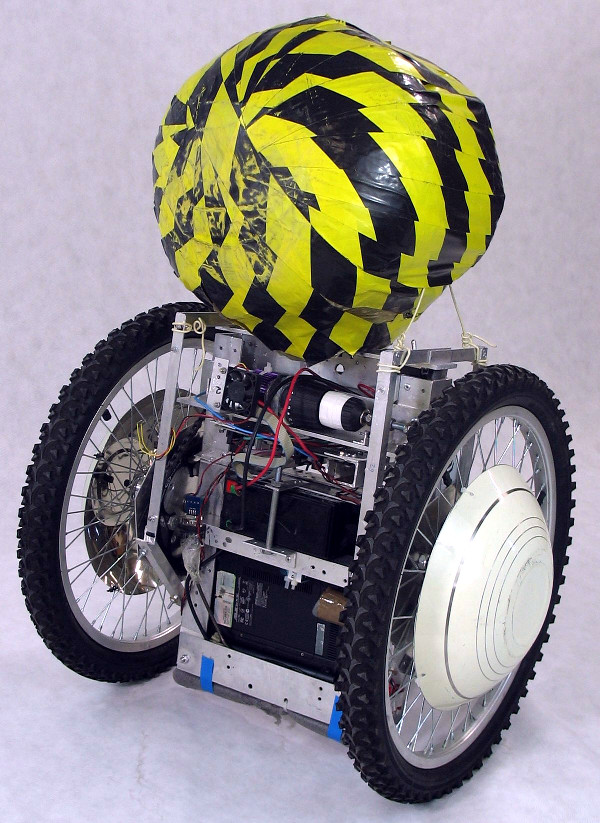
Renowacja robota mobilnego Ryś
Naprawa naszego ulubionego Robota pokazowego
Diagnoza usterki
W robocie doszło do uszkodzenia sterownika jednego z dwóch silników napędowych. Diagnoza rozpoczęła się od sprawdzenia odczytów z czujników znajdujących się w uszkodzonym sterowniku. Na tym etapie ustalono iż układ MAX485 odpowiedzialny za komunikację pomiędzy sterownikiem a komputerem nie działa prawidłowo. Kolejnym etapem było sprawdzenie działania analogowej części mocy sterownika składającej się z dwóch par tranzystorów MOSFET, oddzielonych od części logicznej za pomocą transoptorów. Po zmierzeniu napięć na bramkach tranzystorów oraz na wyjściach sterujących mikrokontrolera okazało się że transoptory nie działają prawidłowo.

Podjęte działania
Ze względu na problematyczność wymiany uszkodzonych elementów, na bazie zapasowej płytki PCB, zmontowano nowy sterownik. Zostały w nim wprowadzone modyfikacje usprawniające pracę z robotem i poprawiające estetykę, jak np. złącza zasilające innego typu. Ponieważ do poprawnego działania robot potrzebuje dwóch identycznych mostków, to w drugim mostku zostały wymienione tranzystory MOSFET oraz wprowadzone zmiany analogicznie do poprzedniego. Dodatkowo zostały wymienione silniki napędowe, ponieważ podczas testów uzwojenie jednego z silników zostało częściowo uszkodzone. W rezultacie robot posiada dwa zespoły napędowe o identycznej charakterystyce pracy.
Autorzy
Kamil ForyszewskiVitalii Kutia
Wsparcie
Bartosz ŚwistakDawid Seredyński
Konrad Banachowicz