Projekty
Grupa robotów ,,Mini RYŚ''
Motywacja
Grupy robotów to prężnie rozwijająca się dziedzina, stwarzająca ogromne możliwości. Praca nad projektem systemu wielorobotowego jest dobrą okazją do przyswajania i zgłębiania elementów rozproszonych sposobów rozwiązywania problemów i współpracy.
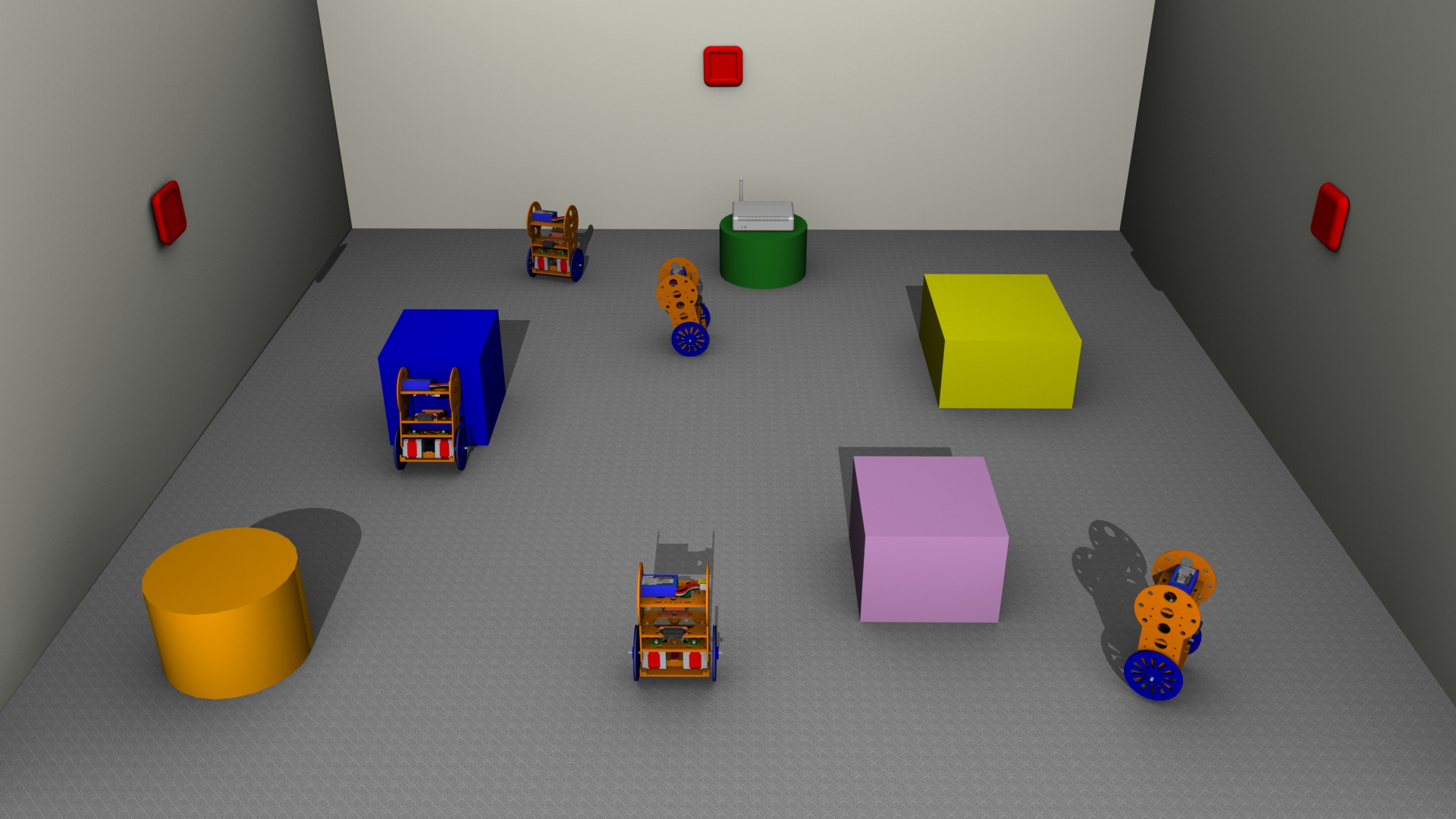
Opis funkcjonalności
Projekt w początkowej fazie zakłada konstrukcję kilku takich samych robotów o wymiarach nieprzekraczających 18x8 cm w podstawie oraz 15 cm wysokości, których grono można będzie dowolnie powiększać. Jednym z jego głównych zastosowań jest możliwość transportu obiektów w określone miejsce w przestrzeni. Roboty mogą wspólnie przesuwać obiekty i pomagać sobie, gdy jeden robot nie jest w stanie przemieścić obiektu. Pozwala to tworzyć proste gry polegające na opracowaniu optymalnego algorytmu przemieszczania obiektów. Roboty mogą się wzajemnie komunikować i lokalizować.
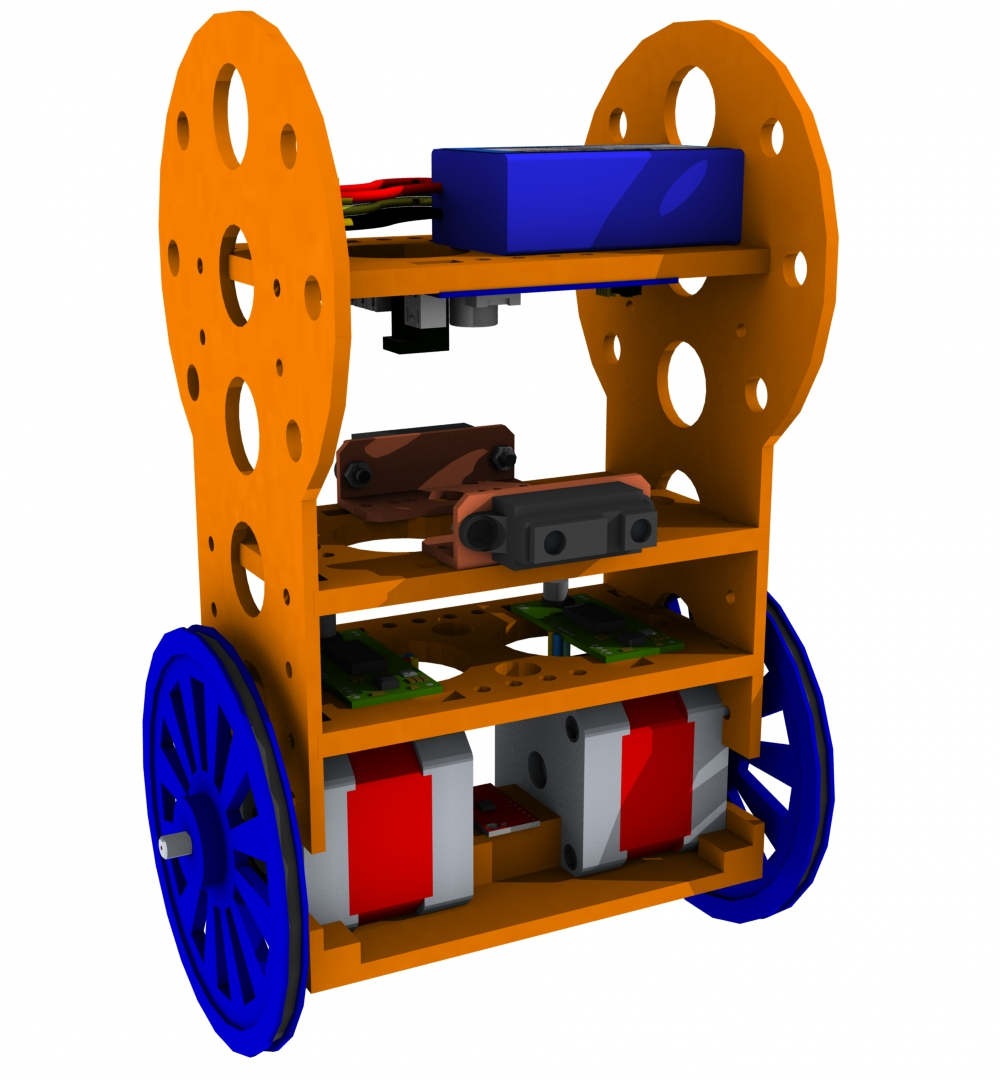
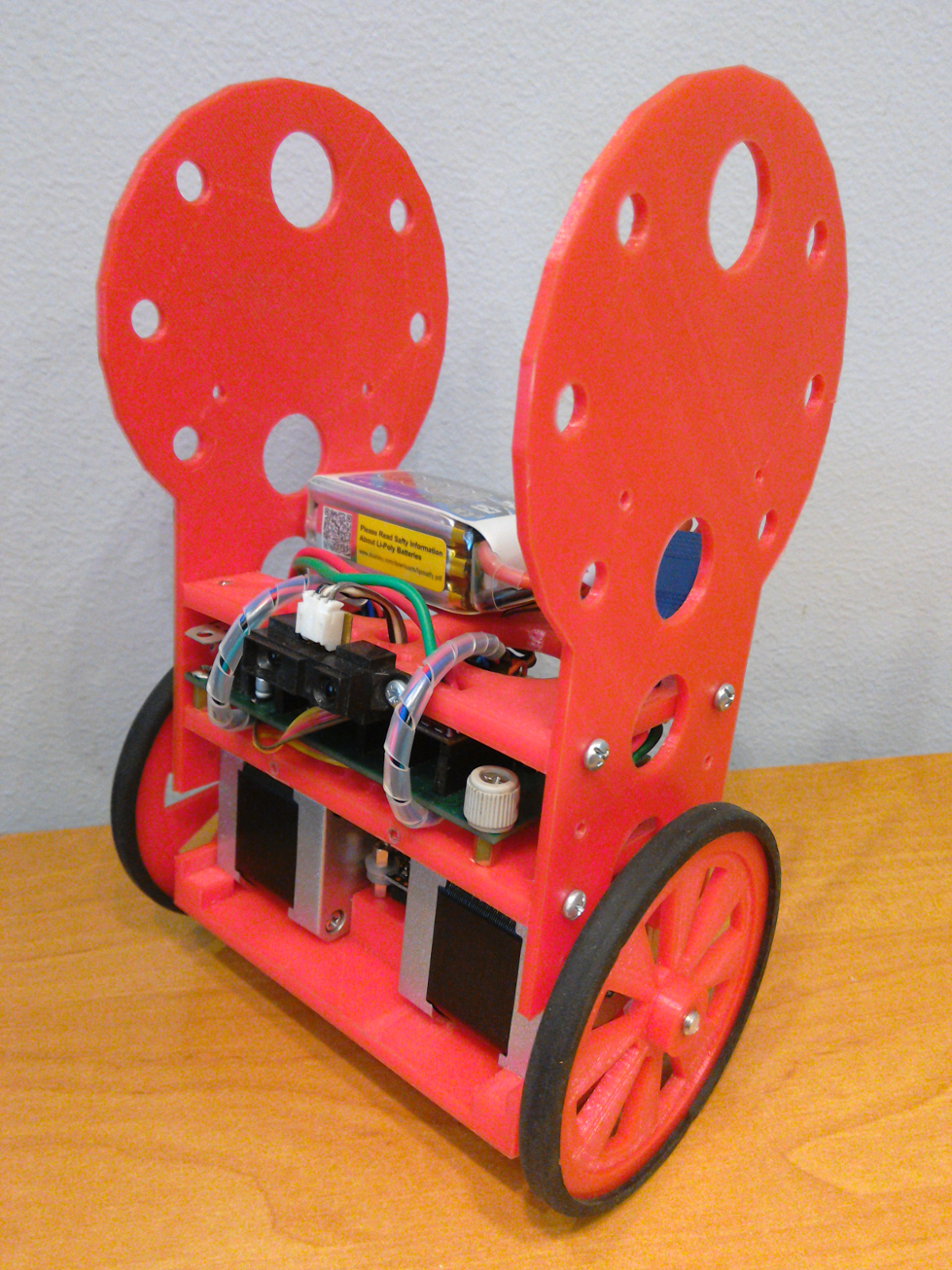
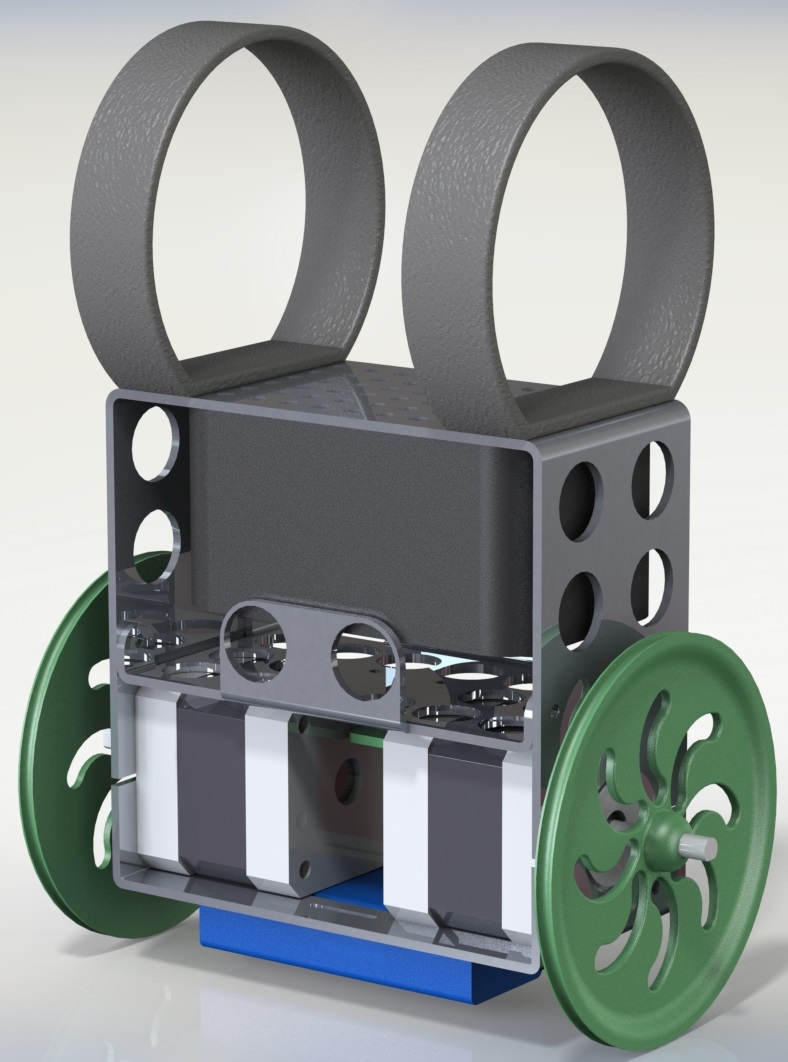
Opis konstrukcji
Tworzenie grupy robotów o zmiennym sposobie lokomocji jest rozwinięciem projektu robota RYŚ, czyli dwukołowej platformy mobilnej o napędzie różnicowym. Podstawowym trybem poruszania się platformy jest pozycja pionowa, do której utrzymywania niezbędne są czujniki inercyjne oraz odpowiedni sterownik. Dodatkowo na platformie zostaną zainstalowane czujniki stanu otoczenia takie jak dalmierze, czujniki podłoża oraz opcjonalnie kamera w celu umożliwienia realizacji algorytmów wizyjnych. Korpus robota wykonany jest z blachy aluminiowej, ciętej laserem i kształtowanej na giętarce. Koła wykonane są w technologii druku 3D.
Opis elektroniki
Projekt zakłada użycie systemu czasu rzeczywistego do kontroli nad procesami priorytetowymi (takimi jak kontrola silników, odczyty danych z czujników krytycznych, utrzymanie robota w odpowiedniej pozycji, określanie lokalizacji) oraz systemu odpowiedzialnego za wymianę informacji na wyższym poziomie abstrakcji (wysyłanie komend do mikrokontrolera sterującego oraz realizację zadań złożonych obliczeniowo lub wymagających większych zasobów sprzętowych). Za realizację tych zadań odpowiedzialny jest jednopłytkowy komputer Beagle Bone Green Wireless. Zawiera on w sobie wydajny procesor z rdzeniem ARM, pamięć RAM oraz FLASH i moduł komunikacji WiFi/Bluetooth. Komunikuje się on z pozostałymi podzespołami przy pomocy złącza GPIO. Są to sterowniki silników, moduł lokalizacji, czujnik inercyjny (akcelerometr + żyroskop), układ zarządzania zasilaniem oraz czujniki odległości.
Koordynator
Kamil ForyszewskiAutorzy
Marta PacuszkaTomasz Gałecki
Wsparcie
Bartosz ŚwistakBartosz Kaczor
Maciej Węgierek
Konrad Banachowicz
Maciej Stefańczyk