Projekty Arduino
TriOmiX 0 (prototyp)
Robot Mobilny na kołach Omni
Autorzy
Bartosz ŚwistakZałożenia
Celem projektu było stworzenie prototypu robota na kołach Omni.
Opis konstrukcji
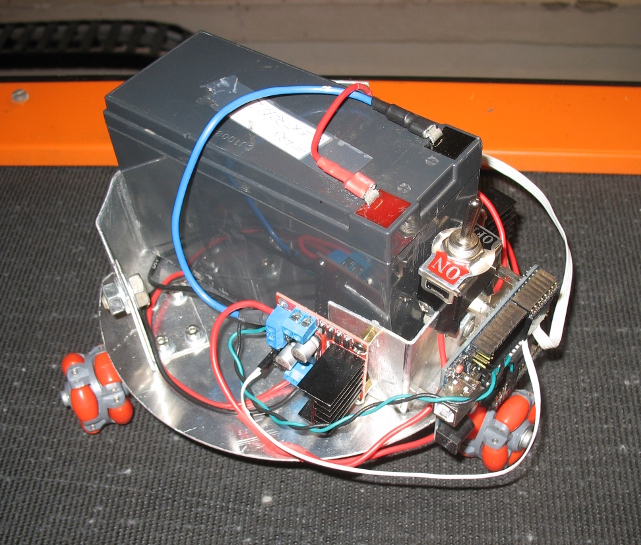
TriOmniX jest robotem holonomiczny, opartym o trzy koła szwedzkie. Głównymi elementami konstrukcyjnymi jest wycięta laserowo blacha do której przymocowane są silniki, elementy elektroniczne i bateria.

Opis elektroniki
Elektronika robota składa się z następujących elementów:
- 2 mostki H - elementy pozwalające sterować mocą przekazywaną na silniki
- Arduino UNO - mikrokontroler
Epilog
Kolejne wersje robota (TriOmiX I, TriOmiX II) zostały wykorzystana w projekcie ThrowBot