Roboty
Bombel V2
Dydaktyczny robot manipulacyjny
Autorzy
Kamil ForyszewskiHubert Kowalski
Piotr Matysiak
Marta Pacuszka
Maciej Pawliński
Michał Romanowski
Marcin Skrzypkowski
Michał Stolarz
Konrad Winnicki
Maciej Węgierek
Tomasz Ziemnicki
Opis
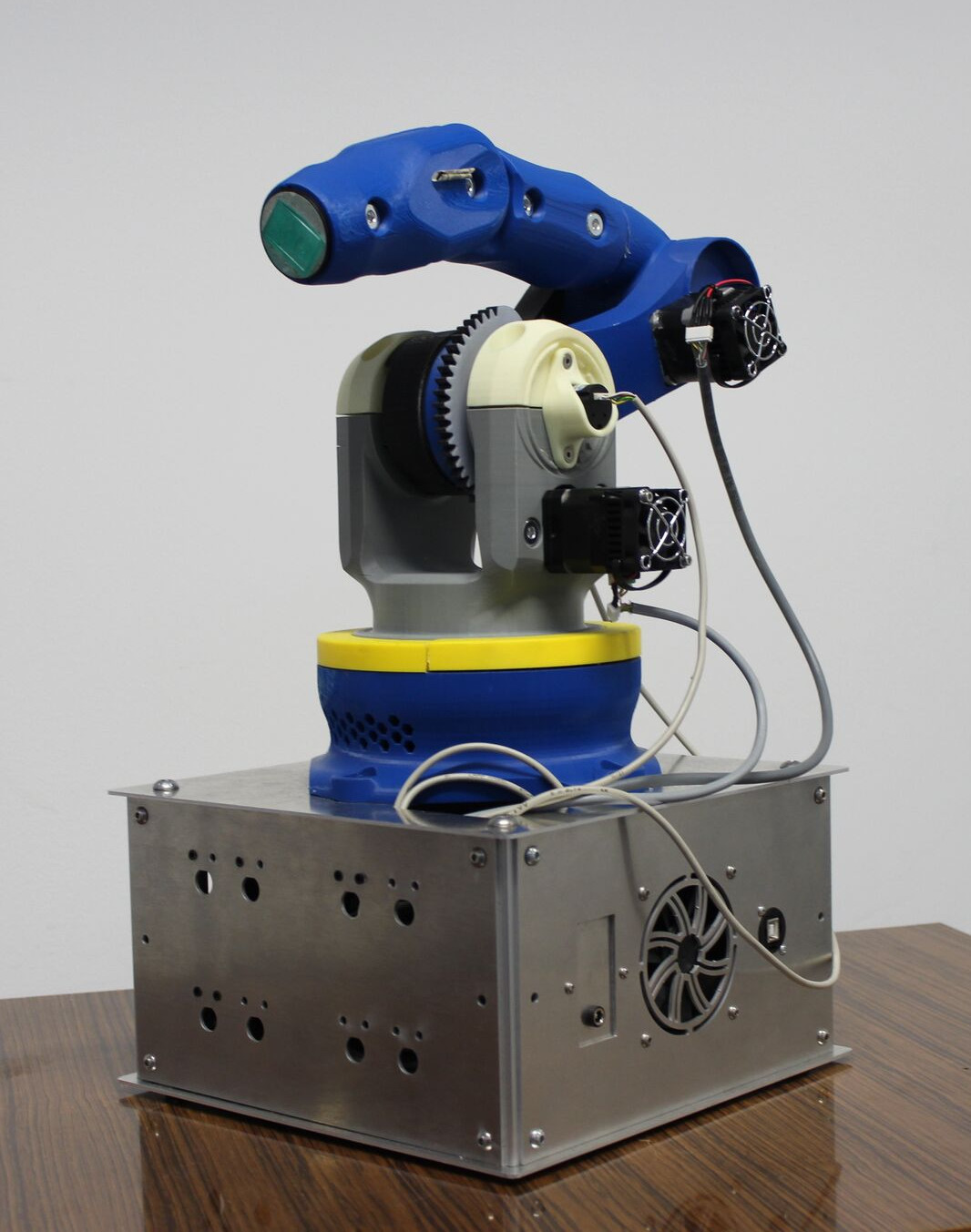
,,Bombel’’ jest dydaktycznym robotem manipulacyjnym. Rozpoczęcie prac nad manipulatorem przypada na początek semestru 16Z. Celem projektu jest przygotowanie stanowisk dydaktycznych dla członków koła i studentów oraz spopularyzowanie wiedzy na temat robotów manipulacyjnych. Główną zaletą robota jest jego niski koszt produkcji oraz stosunkowo prosta budowa.
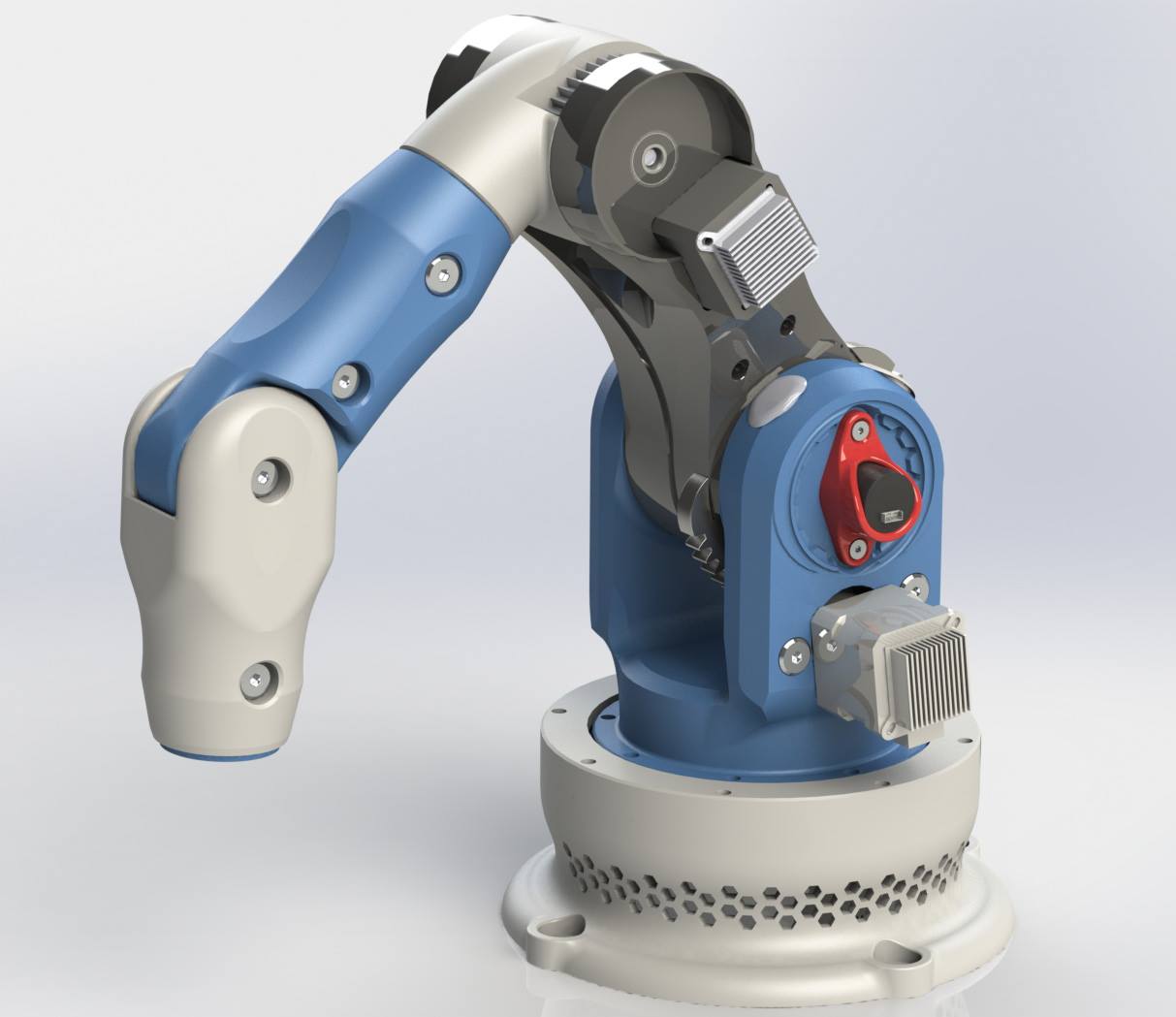
Opis konstrukcji
Robot został zaprojektowany przez członków koła na podstawie modelu dostępnego na licencji Creative Commons. Następnie człony robota zostały wydrukowane na drukarce 3D oraz złożone w całość.
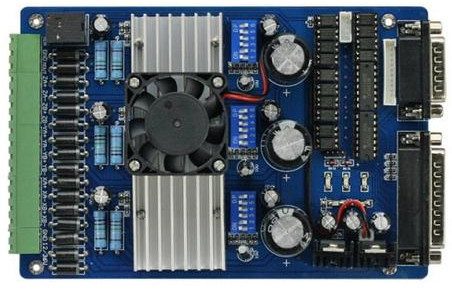
Opis elektroniki
Elektronika robota oparta jest o mikrokontroler STM32F4 . Płytka zawiera rdzeń Cortex-M4, który posiada wystarczający zapas mocy obliczeniowej. Pozostałe komponenty to:
- Sterownik silników oparty na układach Toshiba TB6560
- Silniki krokowe Nema 17
- Panel operatorski zawierający wyświetlacz oraz enkoder inkrementalny
- Enkodery absolutne
- Zasilacz 12V
Opis Oprogramowania
Oprogramowanie robota jest typu modułowego, niskopoziomowego. Rdzeniem oprogramowania jest moduł odpowiedzialny za sterowanie silnikami. Równie ważną funkcjonalnością jest obsługa komunikacji UART z komputerem. Całości dopełnia moduł odpowiedzialny za obsługę graficznego interfejsu użytkownika.
Pierwszy prototyp.
Pierwszy prototyp opisywanej platformy został wykonany pod koniec semestru 16Z. Początkowo robot miał był wyposażony w silniki, które nie dostarczały dostatecznie dużego zapasu momentu siły napędów oraz nie posiadał czujników położenia, które w sposób jednoznaczny określałyby położenie stawów robota. Z powodów opisanych powyżej w semestrze 17Z w ramach rozpoczęto prace nad zaprojektowaniem drugiej wersji manipulatora, która została znacząco ulepszona w stosunku do pierwszego prototypu.
