
Elkapod
Autorski sześcionożny robot kroczący z własną elektroniką, mechaniką i oprogramowaniem - od czujników i symulacji aż po autonomię
Dlaczego nogi?
Koła są szybkie, niezawodne i proste — ale kapitulują w chwili, gdy grunt robi się trudny.
Nogi z kolei mogą przekraczać przeszkody, poruszać się po gruzowisku, wspinać się po schodach
i docierać tam, gdzie żaden pojazd kołowy nie ma wstępu. Właśnie dlatego zbudowaliśmy Elkapoda.
Elkapod to sześcionożny robot kroczący KNR Bionik — w pełni autorski hexapod zaprojektowany
od podstaw przez studentów Politechniki Warszawskiej.
Organizacja wewnętrzna projektu
Projekt opiera się na trzech wyspecjalizowanych sekcjach, które ściśle ze sobą współpracują:
Mechanika — korzystając z narzędzi CAD i posiadanych drukarek 3D projektujemy, badamy,
a następnie tworzymy każdy element strukturalny Elkapoda: korpus, człony nóg, stawy i mocowania.
Precyzja i masa to nieustanny kompromis, a każda iteracja przybliża robota do jego ostatecznej formy.
Elektronika — projektujemy własne płytki PCB, system zasilania i układy odpowiedzialne za
sterowanie serwomechanizmami oraz odczyt danych z czujników. To tutaj powstaje sprzętowy fundament,
który łączy napędy, sensory i komputer pokładowy w jeden spójny system.
Software — od firmware STM32 na poziomie bare-metal po wysokopoziomowe węzły ROS2
i pełne środowiska symulacyjne, zespół programistyczny rozwija kompletny stos oprogramowania.
Zajmujemy się algorytmami chodu, solverami kinematyki, fuzją danych z czujników, autonomiczną
nawigacją oraz symulacjami.
Rozwój robota
Konstrukcja i testy odnóża
Na początku rozwoju projektu zaprojektowano pojedyncze odnóże robota. Posiada ono 3 stopnie swobody i jako napędy wykorzystuje serwomechanizmy.
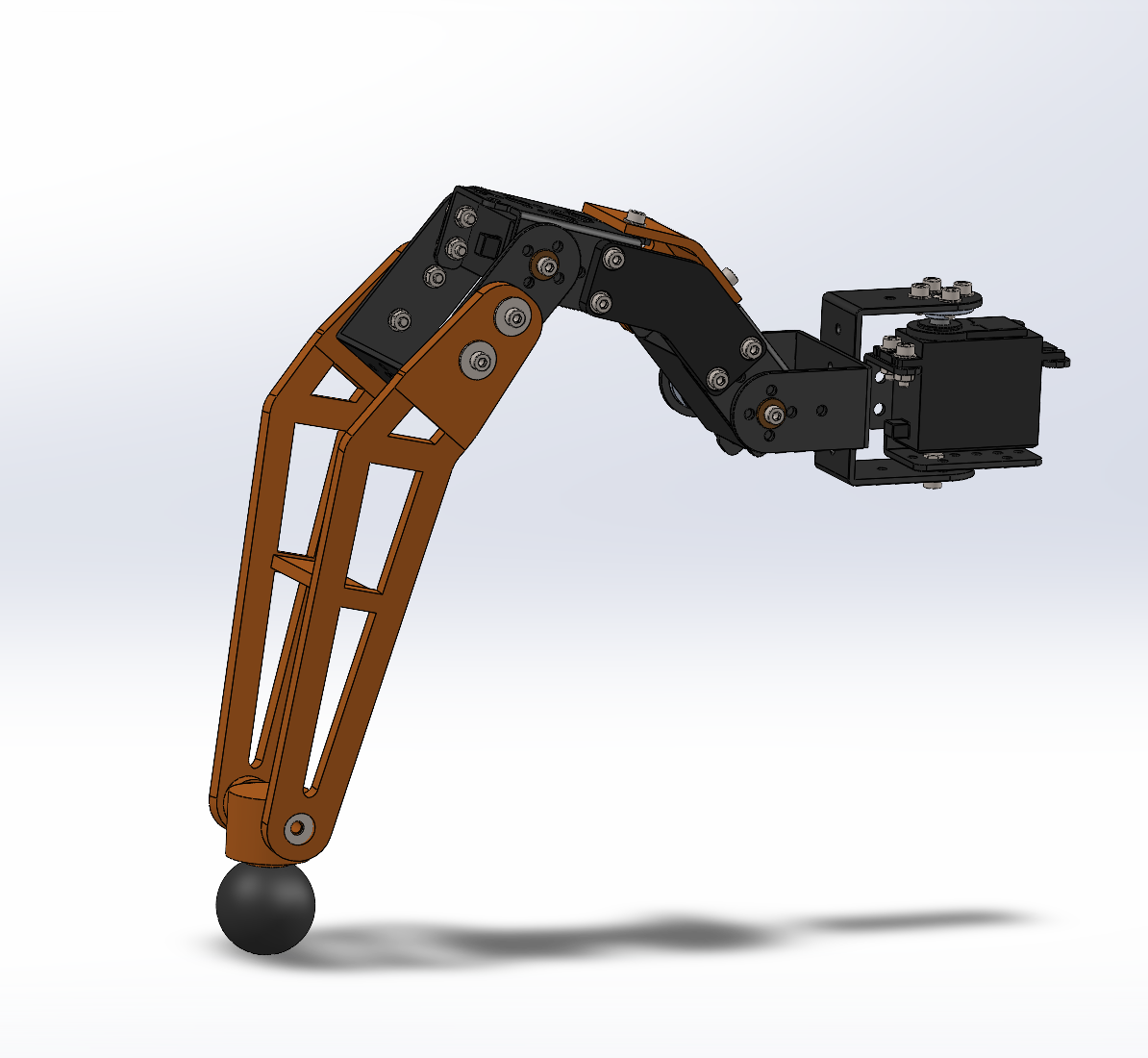
Następnie po integracji przeprowadzono testy ruchu odnóża.
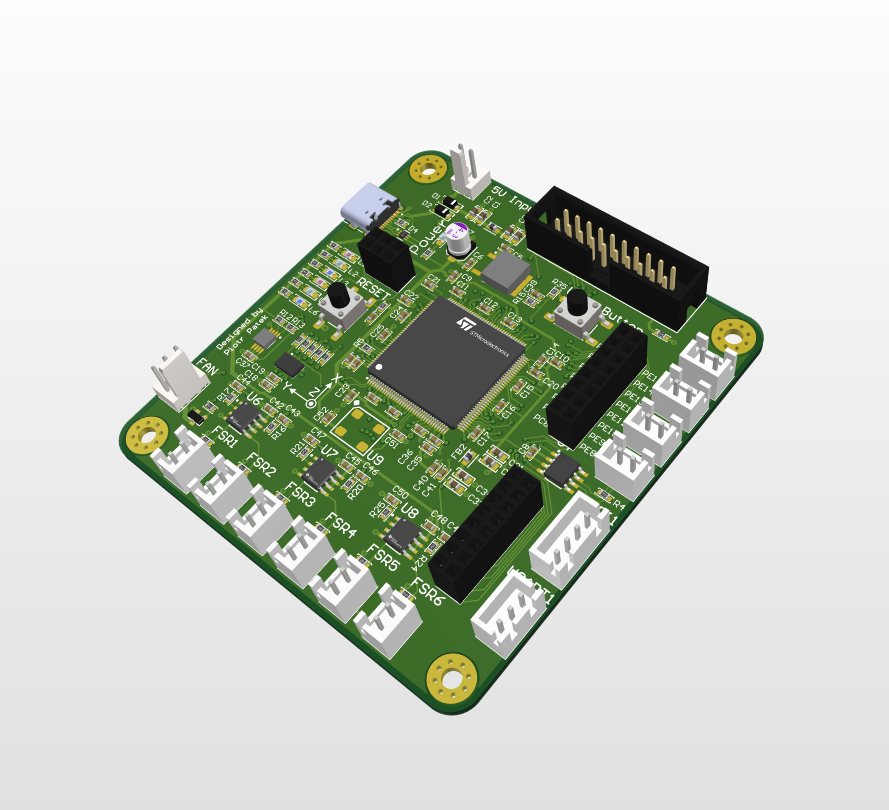
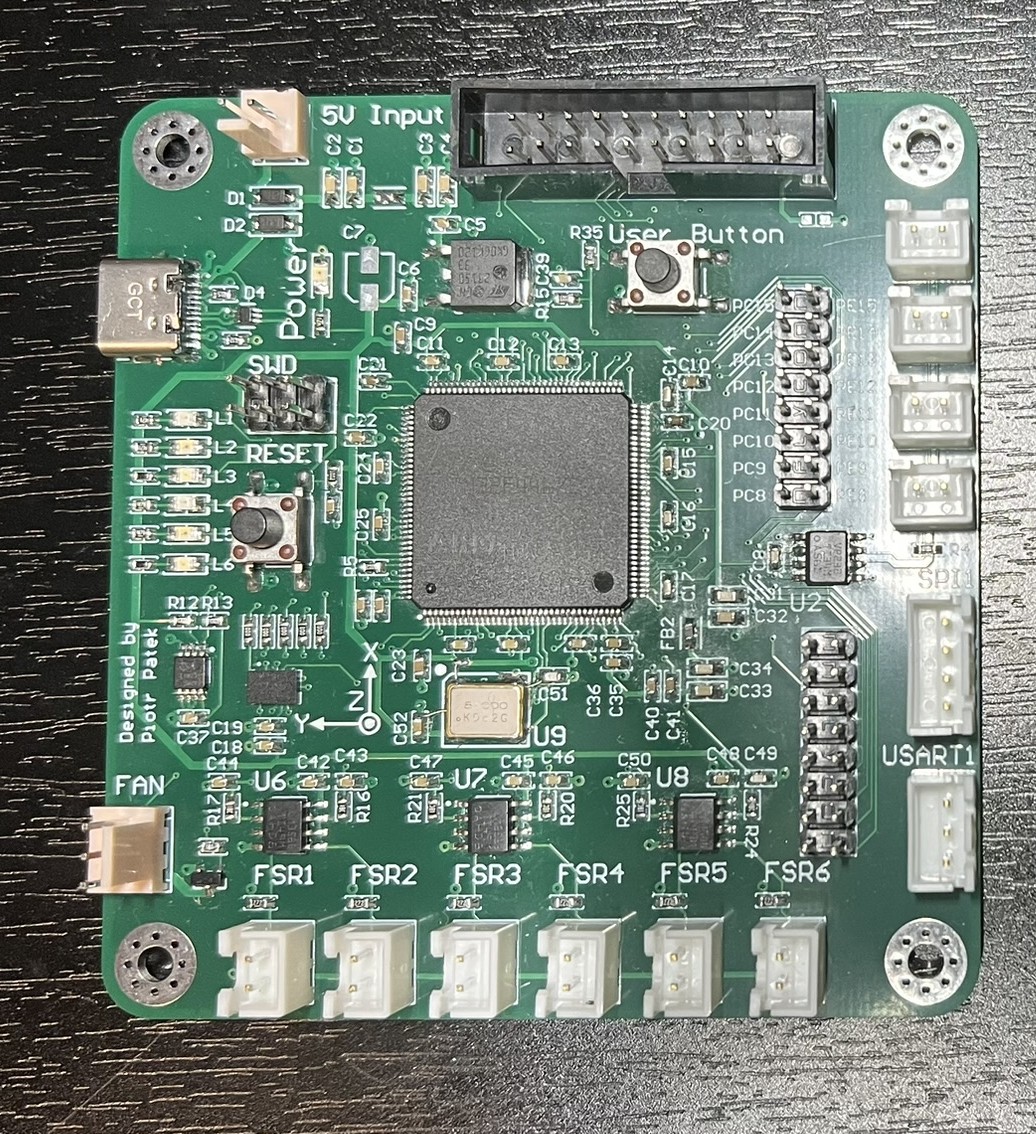
Rozwój elektroniki
Równoległe sterowanie 18 serwomechanizmami robota stanowiło wyzwanie zarówno od strony zasilania jak i sterowania. Podjęto decyzję o zaprojektowaniu dedykowanych płytek drukowanych (PCB), które odpowiadały odpowiednio za:
- sterowanie serwomechanizmami, zbieranie danych z czujników nacisku i jednostki inercyjnej IMU
- zasilanie robota i kontrolę stanu baterii
Cyfrowy bliźniak
Aby uniknąć wąskich gardeł sprzętowych i chronić delikatne komponenty przed przedwczesnym
zużyciem, zespół programistyczny opracował pełne środowisko symulacyjne w Gazebo -
otwartoźródłowym symulatorze robotów. Pozwala to na niezależne opracowywanie i testowanie
algorytmów chodu, solwerów kinematyki i zachowań autonomicznych, znacznie przyspieszając
cykl rozwojowy.
Integracja
Moment integracji był pierwszym etapem, w którym rozwijane wcześniej osobno moduły zaczęły działać
jak jeden organizm. Połączenie mechaniki, elektroniki i oprogramowania wymagało przygotowania
kompletnej wiązki zasilająco-sygnałowej, uruchomienia komunikacji pomiędzy płytami oraz kalibracji
serwomechanizmów, czujników nacisku i IMU w docelowej konfiguracji robota.
Równolegle dopracowano warstwę sterowania odpowiedzialną za bezpieczne inicjalizowanie napędów,
synchronizację ruchu wszystkich sześciu nóg oraz przeniesienie algorytmów testowanych wcześniej
w symulacji na rzeczywistą platformę. Dzięki temu możliwe było przejście od testów pojedynczego
odnóża do pierwszych prób chodu całego robota w laboratorium.
Efektem połączonych prac zespołów było stworzenie pierwszej, funkcjonalnej wersji robota.
Co dalej?
Czy to jest koniec? Na pewno nie! Przed nami nadal ogrom pracy:
Optymalizacja mechaniki
Rozmiar oraz masa korpusu i odnóży robota nadal może być poprawiona - każdy gram się liczy!
Modułowa platforma
Manipulator, dodatkowe czujniki, a może interfejs radiowy pozwalający na sterowanie z daleka?
Zaawansowane chody
Dynamiczna i adaptacyjna lokomocja wykraczająca poza podstawowe chody.
Autonomia
Wdrożenie algorytmów autonomii, które pozwolą robotowi na samodzielne wykonywanie misji.
Dołącz do projektu
Elkapod jest projektem otwartym. Kod źródłowy, projekty sprzętowe i dokumentacja są dostępne na GitHubie.