
Elkapod
A custom-built six-legged walking robot with in-house electronics, mechanics, and software - from sensing and simulation all the way to autonomy.
Why legs?
Wheels are fast, reliable, and simple - but they surrender the moment the terrain becomes difficult.
Legs, on the other hand, can step over obstacles, move across rubble, climb stairs,
and reach places where no wheeled vehicle can go. That is exactly why we built Elkapod.
Elkapod is KNR Bionik's six-legged walking robot - a fully custom hexapod designed
from scratch by students of Warsaw University of Technology.
Internal project structure
The project is built around three specialised teams that work closely together:
Mechanics — using CAD tools and our in-house 3D printers, we design, test,
and then manufacture every structural component of Elkapod: the body, leg segments,
joints, and mounts. Precision and weight are in constant tension, and every iteration
brings the robot closer to its final form.
Electronics — we design our own PCBs, power system, and control circuits for
the servos and sensor interfaces. This is where the hardware foundation is built,
connecting the actuators, sensors, and onboard computer into one coherent system.
Software — from bare-metal STM32 firmware to high-level ROS2 nodes
and full simulation environments, the software team develops the complete software stack.
We work on gait algorithms, kinematics solvers, sensor fusion, autonomous navigation,
and simulation.
Robot development
Leg design and testing
At the beginning of the project, a single robotic leg was designed. It has 3 degrees of freedom
and uses servo motors as its actuators.
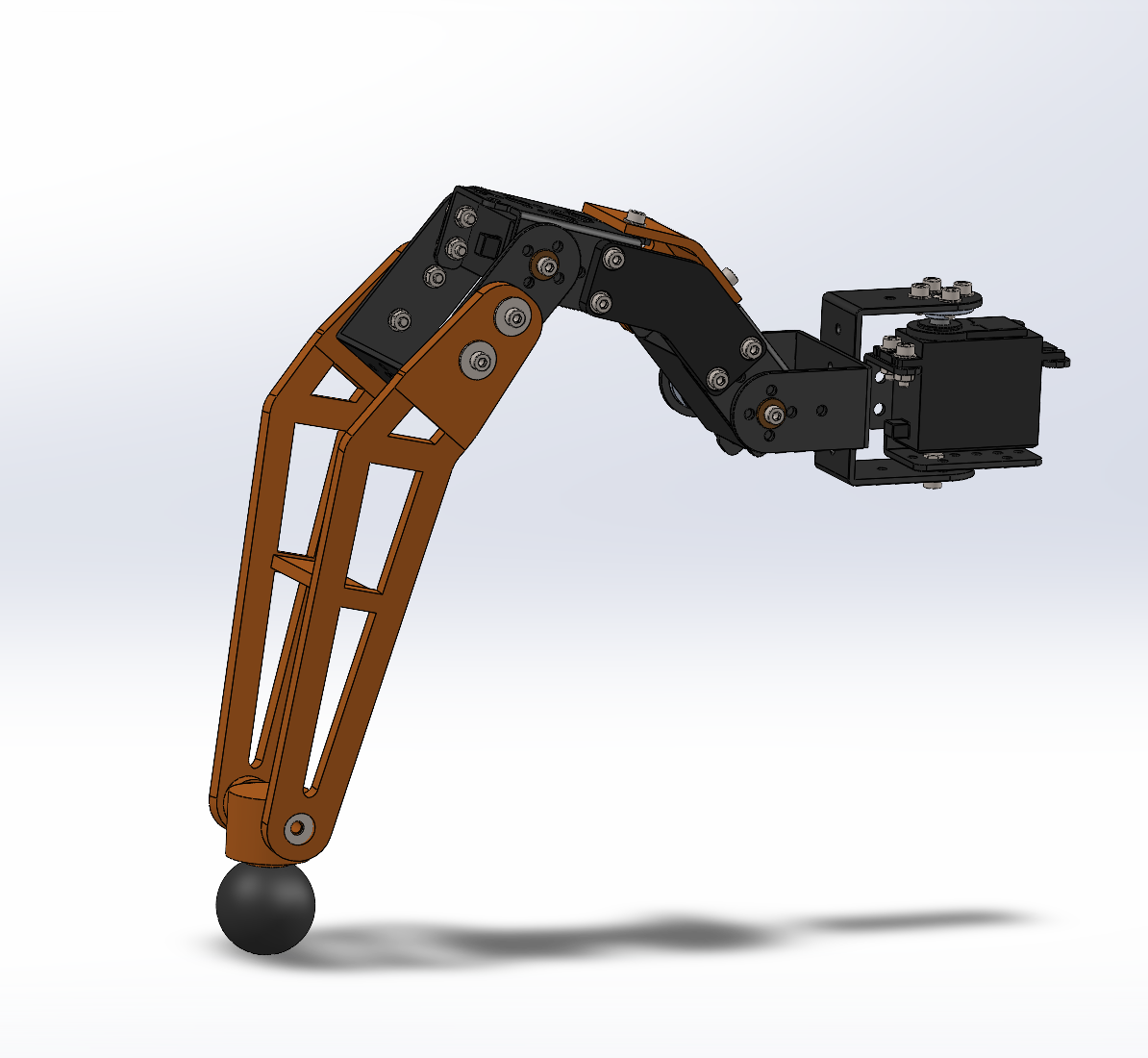
Then, after integration, motion tests of the leg were carried out.
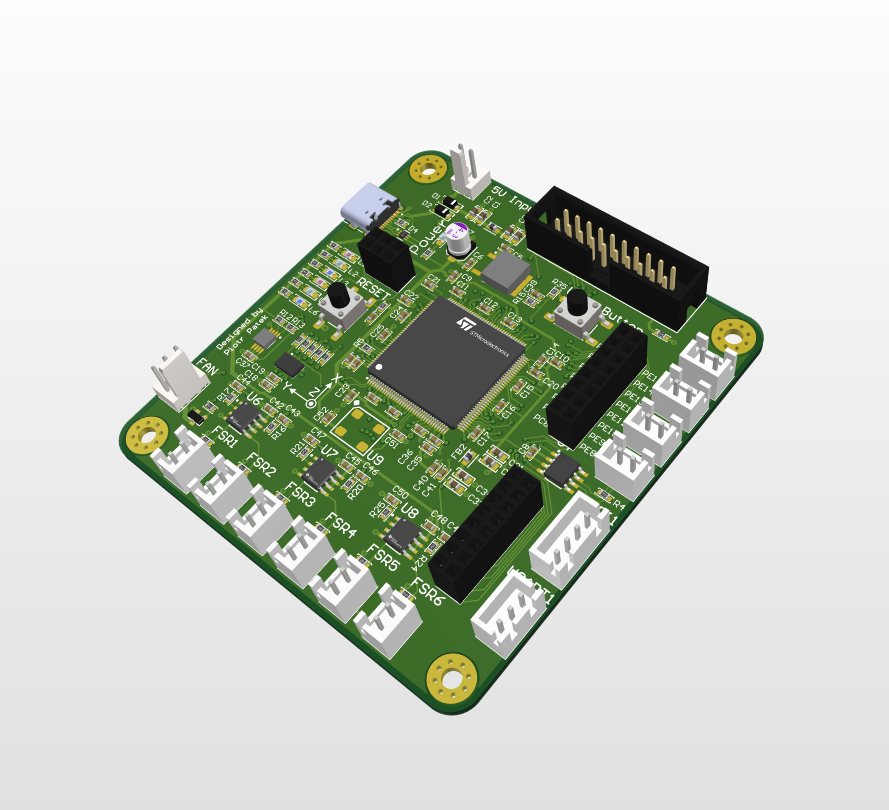
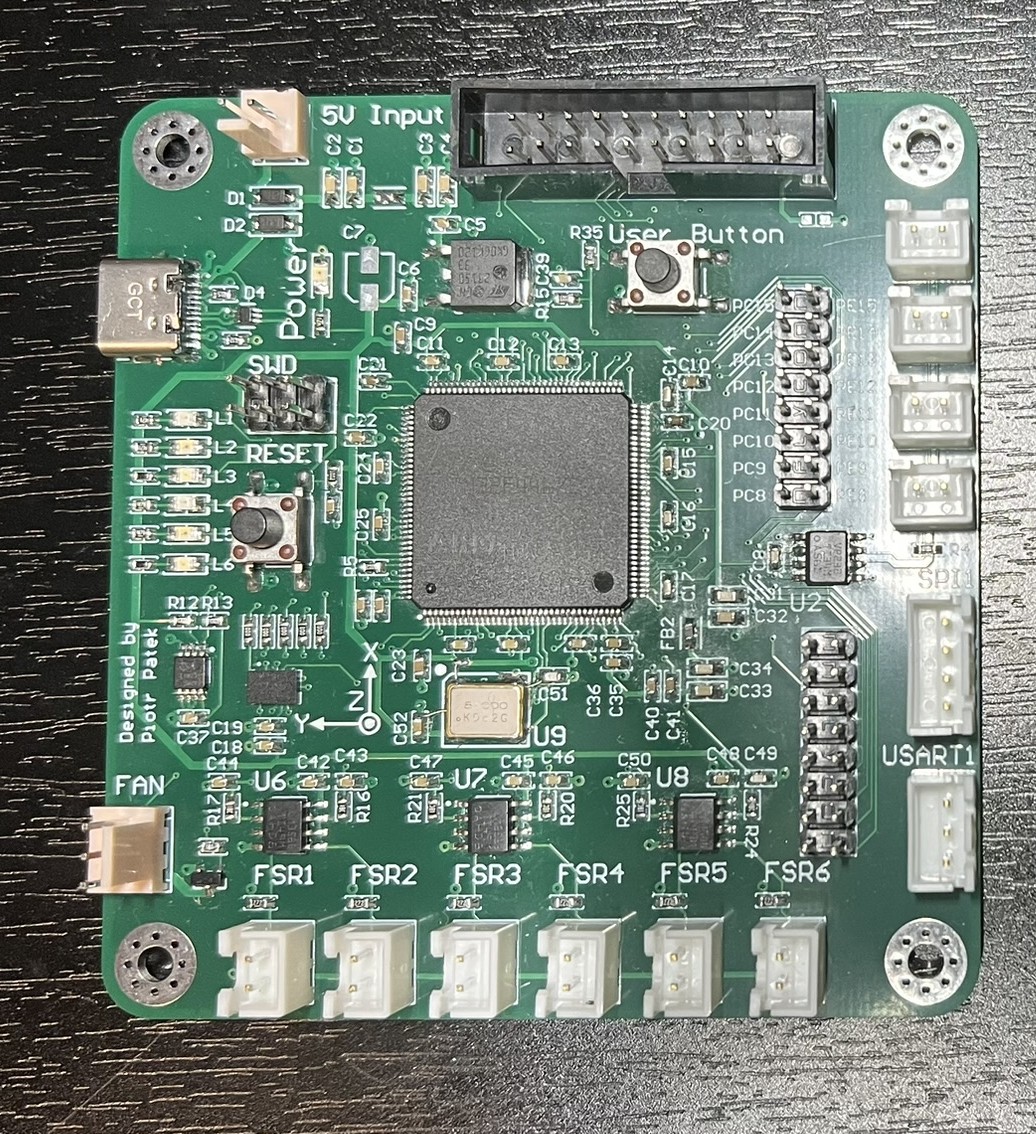
Electronics development
Controlling 18 servo motors in parallel was a challenge both from the power and control perspective.
The team decided to design dedicated printed circuit boards (PCBs) responsible for:
- controlling the servo motors and collecting data from the pressure sensors and IMU
- powering the robot and monitoring battery status
Digital twin
To avoid hardware bottlenecks and protect delicate components from premature
wear, the software team developed a full simulation environment in Gazebo -
an open-source robot simulator. This makes it possible to develop and test
gait algorithms, kinematics solvers, and autonomous behaviours independently,
significantly accelerating the development cycle.
Integration
The integration phase was the first moment when previously separate modules started to work
as a single organism. Combining mechanics, electronics, and software required preparing
the complete power and signal harness, bringing up communication between the boards, and calibrating
the servos, pressure sensors, and IMU in the robot's target configuration.
At the same time, the control layer was refined to safely initialise the actuators,
synchronise the motion of all six legs, and transfer algorithms previously tested in simulation
onto the real platform. This made it possible to move from testing a single leg
to the first walking trials of the full robot in the lab.
The combined work of all teams resulted in the first functional version of the robot.
What's next?
Is this the end? Definitely not. There is still a lot of work ahead of us:
Mechanical optimisation
The size and mass of the robot's body and legs can still be improved - every gram matters.
Modular platform
A manipulator, additional sensors, or perhaps a radio interface for remote control?
Advanced gaits
Dynamic and adaptive locomotion that goes beyond basic gait patterns.
Autonomy
Deployment of autonomy algorithms that will allow the robot to carry out missions on its own.
Join the project
Elkapod is an open project. Source code, hardware designs, and documentation are available on GitHub.