Roboty
miniRyś V0
Prototyp małego robota mobilnego o zmiennym sposobie lokomocji
Autorzy
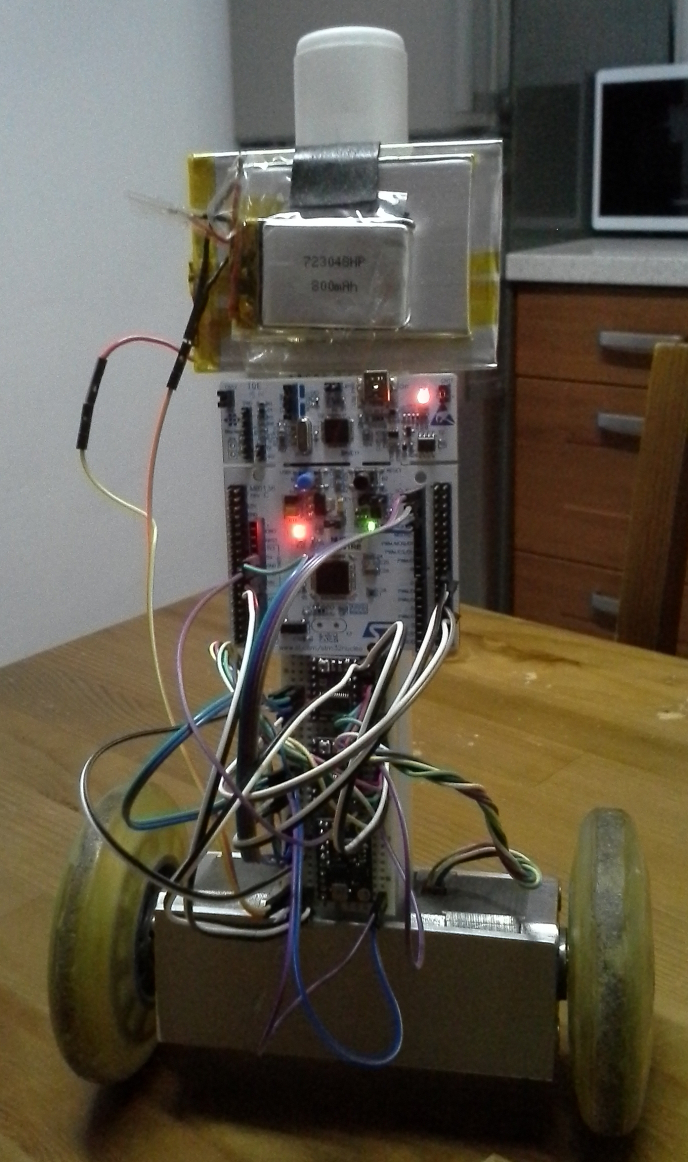
Kamil ForyszewskiPrototyp powstał w celu sprawdzenia możliwości komponentów wchodzących w jego skład. Przede wszystkim silników krokowych, których zastosowanie jest nietypowe dla tego typu konstrukcji. Robot powstał w oparciu o płytkę prototypową STM32 Nucleo integrującą w sobie 32-bitowy mikrokontroler z rdzeniem ARM oraz zestaw peryferiów. Sterowniki silników, czujniki, zasilanie oraz płytka sterująca zostały zamocowane do konstrukcji wykonanej z profilu aluminiowego oraz rurki PVC. Jako przeniesienie napędu zostały użyte kauczukowe koła znane z robota Elektron. Podczas testów silniki okazały się dobrym wyborem, ze względu na wysoką precyzję ruchu oraz prostotę sterowania. Robot jest w stanie osiągnąć odpowiednie prędkość i przyspieszenie, aby mógł przy zmianie kierunku przejść do pionowego trybu jazdy.
Podczas testów zostały określone wymagania dotyczące kolejnego prototypu i propozycje jego modyfikacji. Były to między innymi: zmiana rodzaju kół na lżejsze, o mniejszym momencie bezwładności. Stąd koła w kolejnym wariancie robota mogą zostać wykonane przy użyciu druku 3D. Kolejnym znaczącym wnioskiem jest niewystarczający moment obrotowy zastosowanych silników przy pokonywaniu tarcia statycznego, podczas przesuwania cięższych obiektów. Dlatego w kolejnej wersji zostaną zastosowane silniki o około 30% większym momencie obrotowym, które oprócz rozwiązania problemu dodatkowo powinny zapewnić większą odporność na destabilizację w pionowym trybie ruchu. Ostatnim elementem, o którym warto wspomnieć, jest czujnik inercyjny. Zastosowany moduł GY-80 integruje w sobie 16-bitowy akcelerometr, magnetometr i żyroskop. Okazał się on wystarczający. Jednak użycie magnetometru w przypadku lokalizacji czujnika pomiędzy silnikami, których wirniki zbudowane są z magnesów stałych, zakłóca na tyle pomiar strumienia pola magnetycznego, że czujnik nie może służyć do odczytu położenia względem pola magnetycznego ziemi. Nowa konstrukcja powinna uwzględnić ten fakt.