Roboty sumo
LSRV1
Robot LegoSumo
Autorzy
Paweł StępieńPatryk Dziedzic
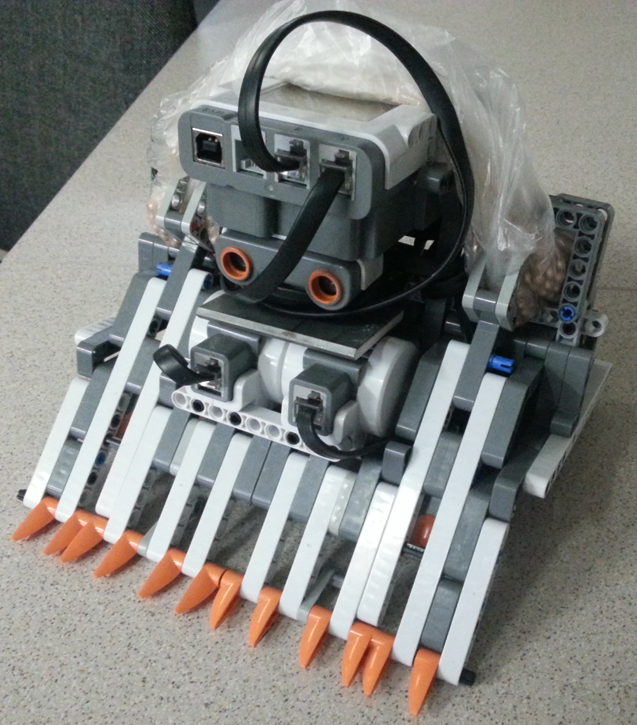
Konstrukcja
Robot LSRV1 (rys. 4) był pierwszym przedstawicielem serii robotów klino-podobnych. Wytrzymałość i zwarta budowa były głównymi celami etapu projektowania konstrukcji. Główny kontroler został umieszczony w centralnym punkcie nad kołami, aby punkt środka masy znalazł się na linii osi kół. Układ jezdny oparty został na podwójnych kołach w celu zmaksymalizowania zwrotności. Ponieważ robot miał sprawdzać się w ciężkich warunkach, zastosowany został napęd bez żadnych przełożeń, aby uniknąć efektu przeskakujących zębatek.
Zasada działania i wyniki
Robot po uruchomieniu czeka 5 sekund i rozpoczyna szukanie przeciwnika. Jeżeli wykrywa przeciwnika przed sobą, rozpoczyna atak dopóki nie straci go z oczu. Jeżeli wykrywa przeciwnika za sobą, dokonuje obrotu (max 360 stopni), dopóki zobaczy przeciwnika przednim sonarem. Jeżeli nie widzi przeciwnika ani z przodu ani z tyłu, rozpoczyna patrol, 3 sekundy jazdy na wprost po czym obrót 360 stopni, aż znajdzie przeciwnika. Poza całym tym algorytmem walki, cały czas sprawdzany jest stan znajdującego się pod nim podłoża. Jeżeli czujnik prawy wykryje biały kolor, co znaczy, że robot prawą częścią pługu wjechał na białą linie. W takim przypadku robot najpierw odrobinę cofa, po łuku w prawo(jeden silnik na 50%), po czym dokonuje obrotu o 90 stopni w lewo (szukając przeciwnika sonarami), jeżeli nic nie znajdzie rozpoczyna patrol. Analogicznie dla wykrycia białej powierzchni lewym czujnikiem.
Robot pokonał wszystkich konkurentów w wewnętrznych wydziałowych zawodach LEGO sumo.