Roboty sumo
Goliat II
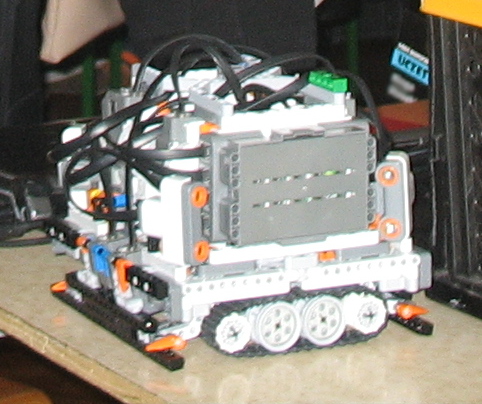
Robot LegoSumo
Autorzy
Bartosz ŚwistakHistoria
Robot Goliat był pierwszym robotem stworzonym na potrzeby zawodów. Jego zadaniem było stanowienie ruchomego celu dla innych uczestników w testach przygotowawczych.
Konstrukcja
Robot został zbudowany względnie symetrycznie. Porusza się jednakowo w obie strony, więc trudno jednoznacznie określić jego przód i tył. Założeniem bazy jezdnej było umożliwienie robotowi wykonywania obrotów wokół własnej osi dla większej manewrowości i łatwiejszego poszukiwania przeciwnika. Z tych powodów jako napęd został wybrany gąsienicowy układ bieżny i był to jedyny robot, który z niego korzystał. Aby zwiększyć siłę robota zastosowany został trzeci silnik, który poprzez przekładnie różnicową pomaga przy ataku i nie przeszkadza przy obracaniu robota.
Zasada działania i wyniki
Ze względu na symetryczność robota czujniki światła odbitego od brzegów dojo znajdują się zarówno z obu stron konstrukcji. Umożliwia to robotowi przejeżdżanie przez całą planszę od jednego krańca do drugiego bez wypadania za matę. Sonary ultradźwiękowe robota znajdują się po jego bokach. Dzięki nim robot wiedział, kiedy należy wykonać obrót i zaatakować przeciwnika.
Po stworzeniu robotów wyposażonych w pługi, które w prosty sposób pokonywały Goliata, jego konstrukcja została zmodyfikowana. Do robota zostały doczepione zabezpieczenia przeciwko klinom, które po zawodach zostały zmodyfikowane i robot nie stanowił już łatwego przeciwnika. Robot zajął czwarte miejsce w zawodach Bionikalia 2013.