Roboty
HMT
Robot Mobilny do ligi RoboCup
Autorzy
Marcin HamadaSześć identycznych robotów HMT zostało stworzonych z myślą o lidze RoboCup. Podczas rozgrywek drużyny rywalizują ze sobą w grze, analogicznie do piłki nożnej, w której celem jest strzelenie przeciwnikowi gola. Roboty w zależności od obranej strategii mogą wymieniać się pozycjami na boisku, bądź być przypisane do poszczególnych formacji, jak atak czy obrona. Przebieg gry jest śledzony przez kamerę umieszczona nad boiskiem. Dzięki analizie obrazu obie drużyny dostają aktualne informacje o ustawieniu robotów i piłki - na ich podstawie system sterowania wyznacza odpowiednią reakcję każdego z graczy.
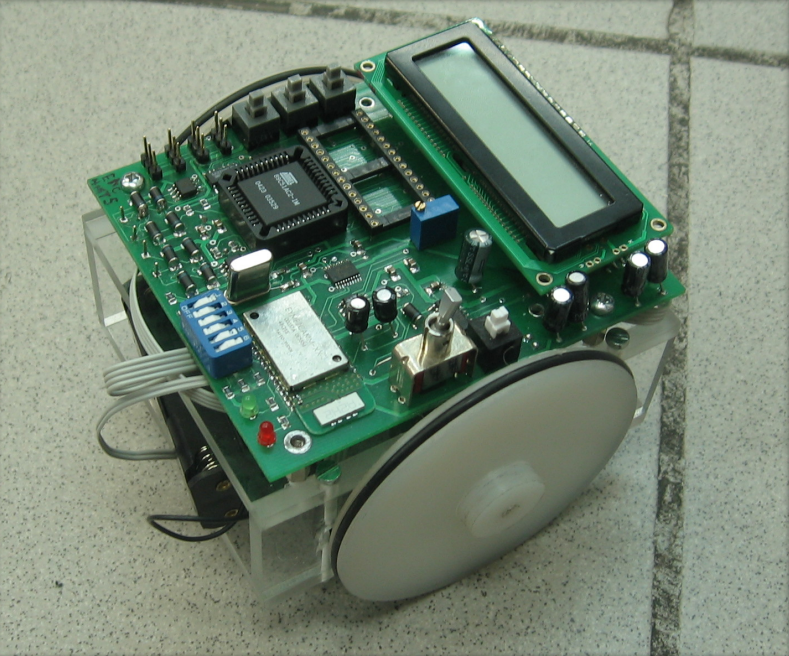
Szkielet robotów zbudowane zostały z przeźroczystego plexi. Każdy posiada dwa silniki DC oraz moduł komunikacji BlueTooth. Zasilanie z akumulatora litowego pozwala na kilka godzin nie przerwanej rozgrywki. Wyświetlacze LCD służą do komunikacji z użytkownikiem - przykładowo do okazywania radości po zdobyciu gola.
Poniżej przedstawiono spis uwag, które należy rozważyć przy tworzeniu kolejnych wersji oprogramowania dla robota.
1) Enkodery - obecnie bazują one na czujniku odbiciowym TCRT1000. Jest to jednak rozwiązanie niedobre, gdyż czujnik ten pracuje na wąskim zakresie odległości. W przypadku, gdy tarcza z markerami nie jest w równej odległości od czujnika na całej powierzchni występować mogą błędy w zliczaniu. Należy zamienić zastosowany układ, czujnikiem odbiciowym TCRT5000. Schemat podłączenia jest identyczny z tym jaki jest wykonany na chwilę obecną i przedstawiony został w rozdz. 2.3.2 pracy magisterskiej “Układ sterowania autonomicznym robotem mobilnym” autorstwa Marcina Hamady. Nowy czujnik pracuje w znacznie szerszym zakresie odległości i powinien dawać dobre rezultaty.
2) Baza jezdna - w tej wersji HMT była bazą jezdną wykonaną z pleksi. Sugestią jest aby została ona zmieniona na wersję aluminiową, co pozwoli znacząco zmniejszyć ciężar robota.
3) Oprogramowanie modułu głównego sterownika - ze względu na małą liczbę rozważonych przypadków testowych może okazać się, że pojawią się błędy w działaniu programu. Kod źródłowy zawiera obszerne komentarze, które pomogą w pomyślnym wprowadzaniu zmian. Dodatkową pomocą będzie też ww. praca magisterska.
4) Oprogramowanie Serwera Komunikacyjnego - w docelowym rozwiązaniu cała logika związana z nawiązywaniem i utrzymywaniem połączeń powinna być przerzucona z programów użytkownika na serwer komunikacyjny. W momencie uruchomienia odpowiedniego programu powinien on łączyć się ze wszystkimi wykrytymi sterownikami robotów. Dodatkowo powinien on realizować też funkcje wymiany komunikatów z robotem i ew. ponawiania żądań w przypadku wykrytych błędów transmisji. W programie użytkownika powinny pozostać jedynie proste procedury do komunikacji z robotami.