Projekty
Modularny labirynt dla robotów mobilnych
Plansza do konkurencji Micromouse
Głównym założeniem projektu było stworzenie modularnej planszy (labiryntu), umożliwiającej testowanie robotów klasy Micromouse oraz weryfikowanie algorytmów rozwiązywania labiryntów. Z tego wynikały następujące wymagania dla konstrukcji:
- modularność
- trwałość
- możliwość łatwego odtworzenia układu labiryntu
- przynajmniej częściowa zgodność z wytycznymi Micromouse
Jednakże ze względu na ograniczenie maksymalnego rozmiaru planszy, limitowany budżet, a także chęć i konieczność wykonania jak największej części prac we własnym zakresie wprowadzone zostały odstępstwa:
- Plansza w rozmiarze 8 na 8 pól (kwadrat o boku ok 1,5m)
- Malowanie farbą w sprau (zamiast laminowania)
- Rezygnacja z frezowania krawędzi ścianek i słupków (najczęstsza metoda stabilizacji ścianek)
Finalnie zostały ustalone materiały - sklejka liściasta 12mm na ścianki i podstawę oraz listewki 12mm x 12mm na słupki - oraz sposób montażu labiryntu - słupki oraz ścianki boczne na stałe przykręcone i przyklejone do podstawy, zaś ścianki wtykane w podstawę na kołkach meblowych.
Budowa
Po ustaleniu założeń i dopracowaniu szczegółów zamówiona została płyta główna oraz ścianki docięte na wymiar. Zakupione zostały także pozostałe materiały - kołki meblowe, wkręty, listwy 12mm, klej, farby.
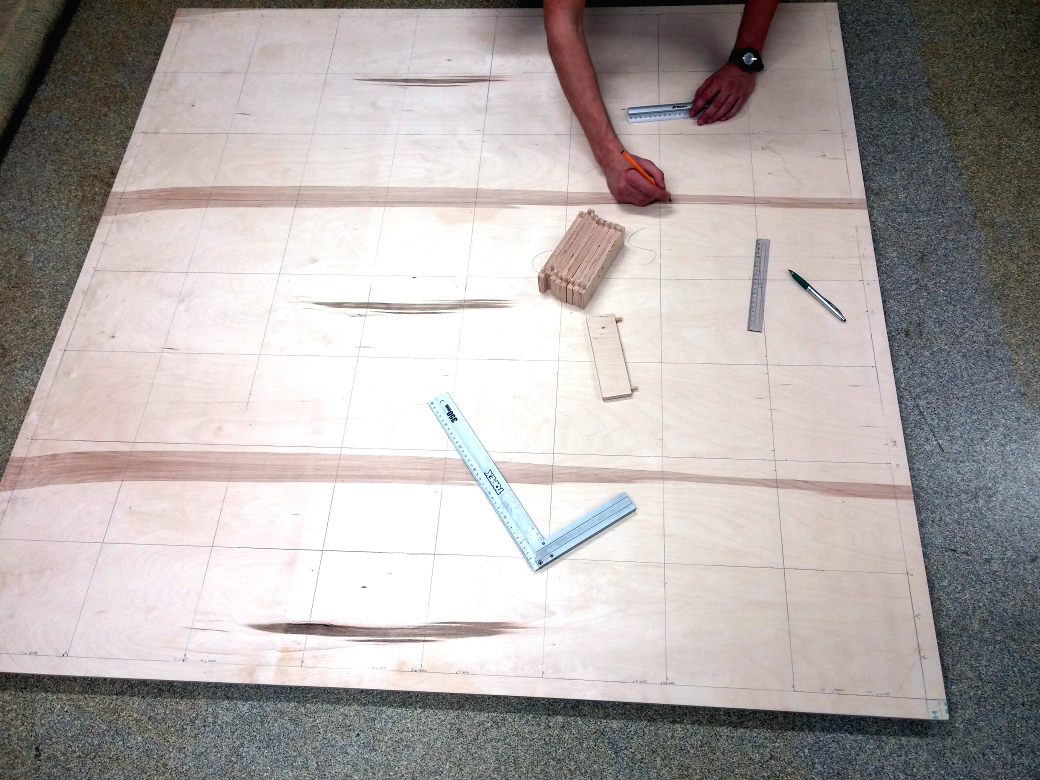
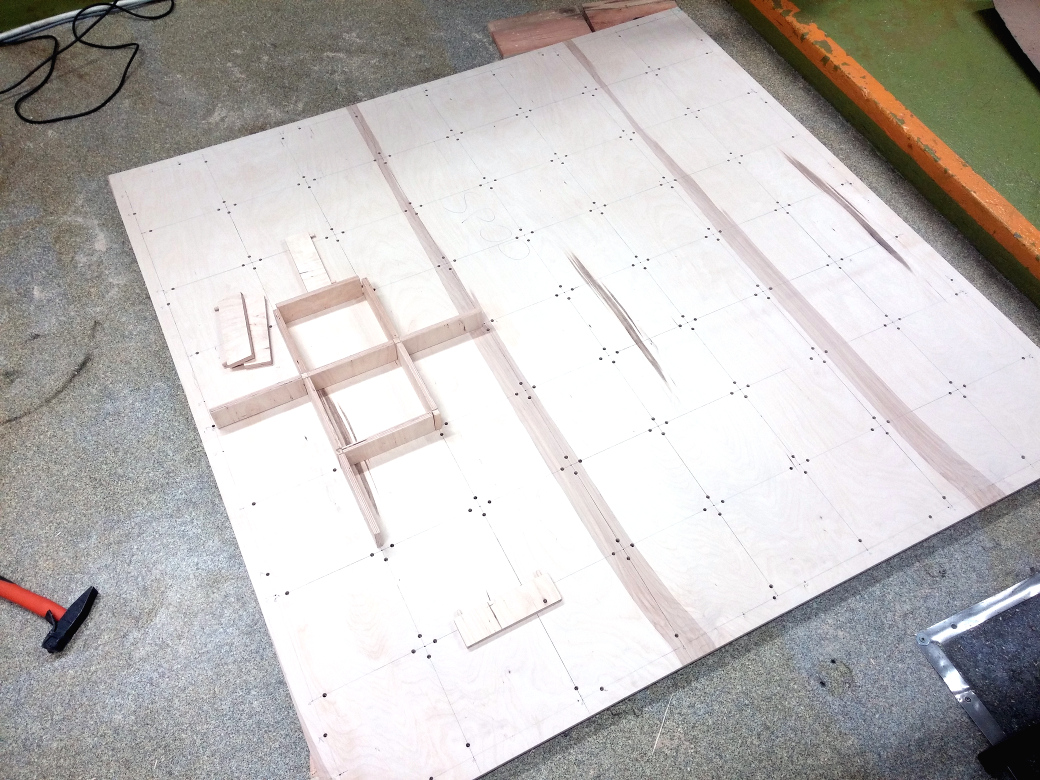
Następnie na podstawie wyzaczona została siatka, na której miał powstać labirynt i zaznaczone miejsca wierceń pod kołki i wkręty. Równolegle wiercone były otwory w podstawie (5 na każde przecięcie siatki i 11 na każdej krawędzi, łącznie około 300 otworów!) oraz otwory na kołki w ściankach (2 w ok 80 ściankach pojedynczych oraz po 15 w bocznych - łącznie ponad 200). W pierwszym przypadku głównymi trudnościami był rozmiar planszy, konieczność korzystania z ręcznych wiertarek oraz jedynie punktowe podparcie konstrukcji (w celu uniknięcia uszkodzenia podłogi). W przypadku wiercenia ścianek zaś wyzwaniem było utrzymanie wysokiej precyzji i powtarzalności nawiertu przy użyciu wiertarki stołowej z wyraźnym biciem bocznym.
Kołki meblowe, po odsianiu wadliwych sztuk i dodatkowej obróbce pozostałych (zgrubne wygładzenie powierzchni i zaokrąglenie krawędzi) zostały wklejone w nawierty w krawędziach ścianek.
Kolejną napotkaną trudnością okazało się nawiercenie otworów na wkręty w słupkach, docinanych ręcznie z listew 12mm. Dokładność wykonania a także przycięcia listew była dość niska, a ponadto materiał okazał się mocno niejednolity, co powodowało ściąganie wiertła podczas wiercenia.
Po przygotowaniu wszystkich elementów drewnianych oraz zabezpieczeniu miejsca do pracy wszystkie elementy zostały pomalowane farbami w sprayu - podłoże czarną matową zaś ścianki i słupki białą matową. Niestety powierzchni, ze względu na ich charakterystykę (mocno chłonne i równie niejednolite drewno), nie udało się pokryć idealnie równo, lecz nie powinno to sprawić większych problemów robotom sterowanym algorytmami z jakimkolwiek filtrowaniem odczytów. Na końcu ścianki zostały pogrupowane, ściśnięte ściskami stolarskimi, zabezpieczone na krawędziach i pomalowane od góry czerwoną błyszczącą farbą.

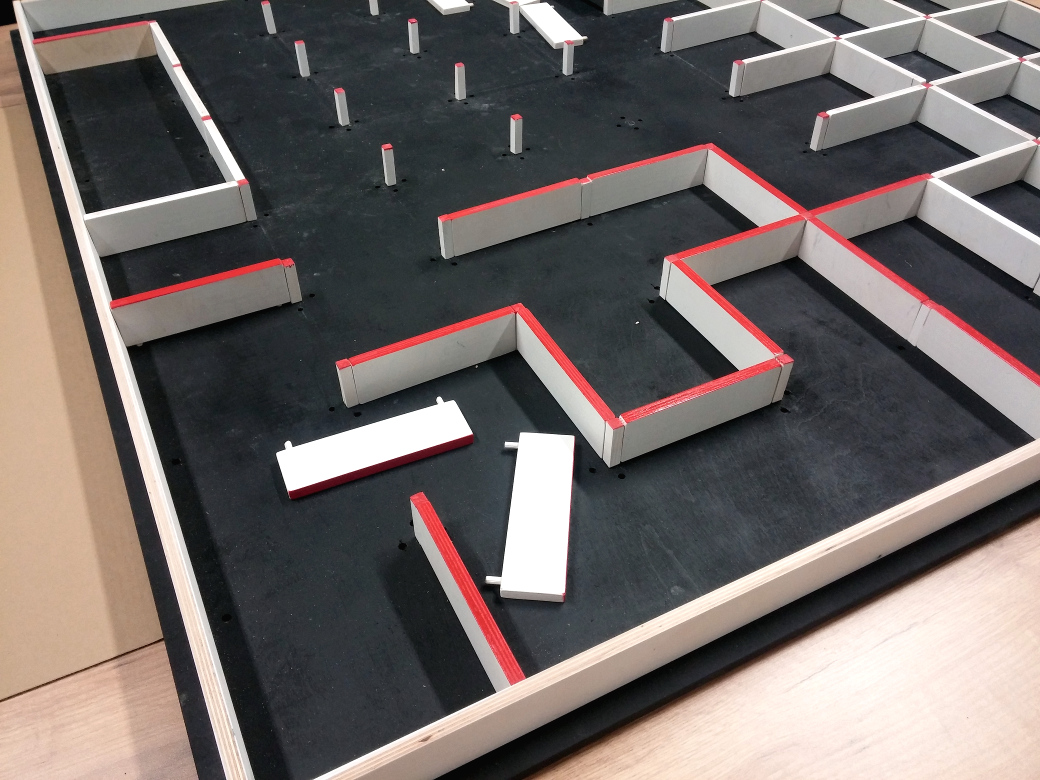
Podczas oczekiwania na wyschnięcie czerwonej farby, do planszy przykręcone wkrętami zostały słupki (pomalowane jako pierwsze). Podobnie jak przy wierceniu, problematyczne okazały się gabaryty podstawy - uniemożliwiały pracę w wygodnej pozycji oraz łatwą weryfikację równego przykręcania, zwłaszcza dla słupków bliżej centrum planszy. Środkowe pole pozostało puste, jako przyszłe pole końcowe (2x2).
Na koniec, jednolite ścianki boczne zostały skręcone w ramkę i przykręcone oraz przyklejone do podstawy, znacząco zwiększając jej sztywność (ale i ciężar). W ramach testowania rozwiązań konstrukcyjnych, w tak przygotowaną bazę włożone zostały ścianki i uformowany został testowy labirynt.

Weryfikacja
Podczas testów konstrukcji wyszły na jaw problemy, spowodowane głównie ograniczoną dokładnością wykonania słupków oraz nieidealnym umiejscowieniem kołków mocujących ścianki. Oba problemy są możliwe do usunięcia poprzez odpowiednie spiłowanie krawędzi słupka, ścianki lub kołka (co zostało częściowo zrealizowane).
Labirynt oczekuje na weryfikację praktyczną z wykorzystaniem robotów.
Rozważana jest propozycja wymiany słupków na metalowe, docięte i nawiercone na obrabiarce numerycznej.
Autorzy
Adam KowalewskiMaciej Bogusz