Projekty
Modularne środowisko dla robotów śledzących linię
Plansza do konkurencji FTL
Założenia
Jednym z czynników wpływających na sukces robota w zawodach jest środowisko, w jakim jest testowany. Plansza pozwalająca na profesjonalną weryfikację algorytmów sterowania powinna umożliwiać:
- budowanie różnych tras w krótkim czasie,
- zapamiętanie ułożonej trasy i zbudowanie takiej samej po upływie czasu,
- zbudowanie dwóch identycznych tras do przeprowadzania wyścigów równoległych,
- stworzenie unormowanego środowiska do badań.
W obliczu typowych rozmiarów robotów i przebiegu tras za cel postawiliśmy sobie skonstruowanie planszy składającej się z kwadratowych elementów o rozmiarach 20 X 20 cm. Każdy z elementów miał posiadać nadruk w postaci np. linii prostej, łuku czy skrzyżowania. Połączone elementy tworzyłyby gotową trasę. Zaletą takiego rozwiązania miała być ich trwałość, odporność na uszkodzenia oraz dokładność wykonania. Ponadto za bardzo ważną cechę środowiska uznaliśmy minimalną wysokość uskoków pomiędzy złączonymi kaflami. Gotowa trasa miała stanowić spójną całość w postaci gładkiego toru przystosowanego niemal dla każdej konstrukcji robotów Line Follower.


Budowa
Podstawowym problemem konstrukcyjnym okazał się dobór materiału, z którego miały być wykonane kafle. Pierwszą próbą było wycinanie elementów z blachy. Tak wykonane kafle były odporne na uszkodzenia, ale nie były idealnie płaskie, przez co po ich złączeniu powstawały uskoki utrudniające robotowi przejazd. Kolejne próby obejmowały wykorzystanie różnego rodzaju tworzyw sztucznych, które ocenialiśmy pod kątem sztywności, podatności na trwałe odkształcenia, wytrzymałości na uszkodzenia mechaniczne, możliwości dokładnego cięcia maszynami cyfrowymi oraz dostępnych technik malowania. Jednym z rozważanych materiałów był polichlorek winylu. Testowe kafle, wycięte przy użyciu lasera, okazały się być idealnie płaskie i lekkie. Na każdym z nich wyznaczyliśmy kształt trasy przy użyciu samoprzylepnej folii wyciętej również laserem. Matowa struktura otrzymanych wzorów nie odbijała światła, dzięki czemu znakomicie sprawdzała się podczas próby przejazdu robota FTL, który do wykrycia czarnej linii korzysta z fotoelektrycznego czujnika odbiciowego. Wadą tak wytworzonych elementów była bardzo niska odporność na uszkodzenia mechaniczne oraz odklejanie się folii przy krawędziach kafli. Polichlorek winylu jest tworzywem kruchym i może pęknąć nawet podczas upuszczenia go z wysokości jednego metra na twardą podłogę. W wyniku wielu prób zdecydowaliśmy się na wykonanie toru z płyty poliwęglanowej, która została pocięta przez maszynę cyfrową typu waterjet. Na każdym z kafli został naniesiony nadruk przy użyciu technologii utrwalania farby promieniem ultrafioletowym.
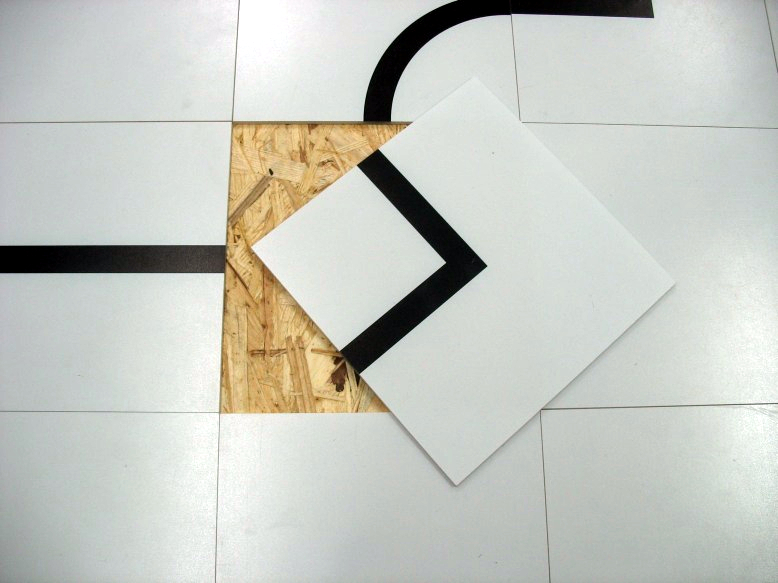
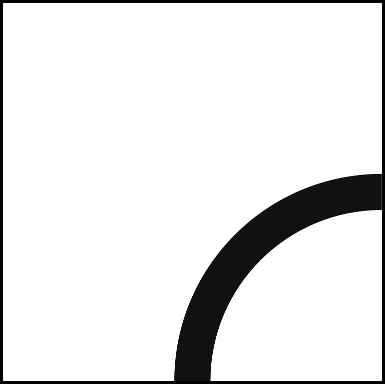
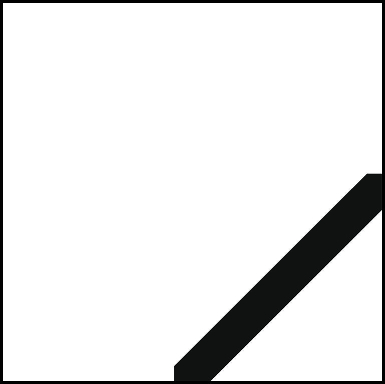
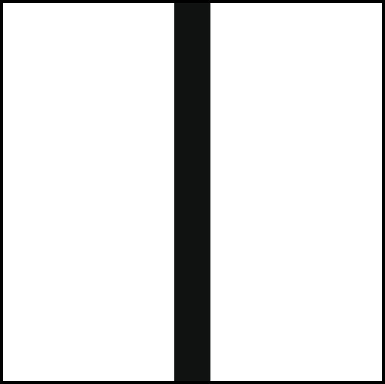
Gotowa plansza składa się z 48 elementów o wymiarach 20 X 20 cm i tworzy spójną całość dzięki obramowaniu wykonanemu z płaskowników aluminiowych. W naszym laboratorium mamy do dyspozycji dwa identyczne tory. Duża liczba nadmiarowych elementów pozwala na tworzenie bardzo zróżnicowanych tras o różnym poziome trudności. Wzory kafli, którymi dysponujemy, przedstawione są poniżej.
Elementy


Weryfikacja
Gotowa plansza była wykorzystywana podczas organizacji ogólnopolskich zawodów robotów Bionikalia 2014 oraz zajęć laboratoryjnych na Wydziale Elektroniki i Technik Informacyjnych Politechniki Warszawskiej.
Użycie materiału, jakim jest poliwęglan, umożliwiło wykonanie niemal idealnie płaskiego podłoża. Gotowa konstrukcja niestety nie jest pozbawiona wad. Dopracowania wymaga technologia nadrukowywania wzorów, która w przypadku naszej planszy okazała się nie być w pełni odporna na zarysowania.

Podczas zawodów Bionikalia 2014 wykorzystano konfiguracje tras o różnym stopniu trudności w zależności od etapu konkursu. Plansza finałowa została ułożona we współpracy z uczestnikami zawodów i poziom jej skomplikowania pozwolił na pokonanie całej trasy jedynie dwóm robotom.
Koordynator
Maciej WęgierekAutorzy
Bartosz ŚwistakRadosław Białobrzeski